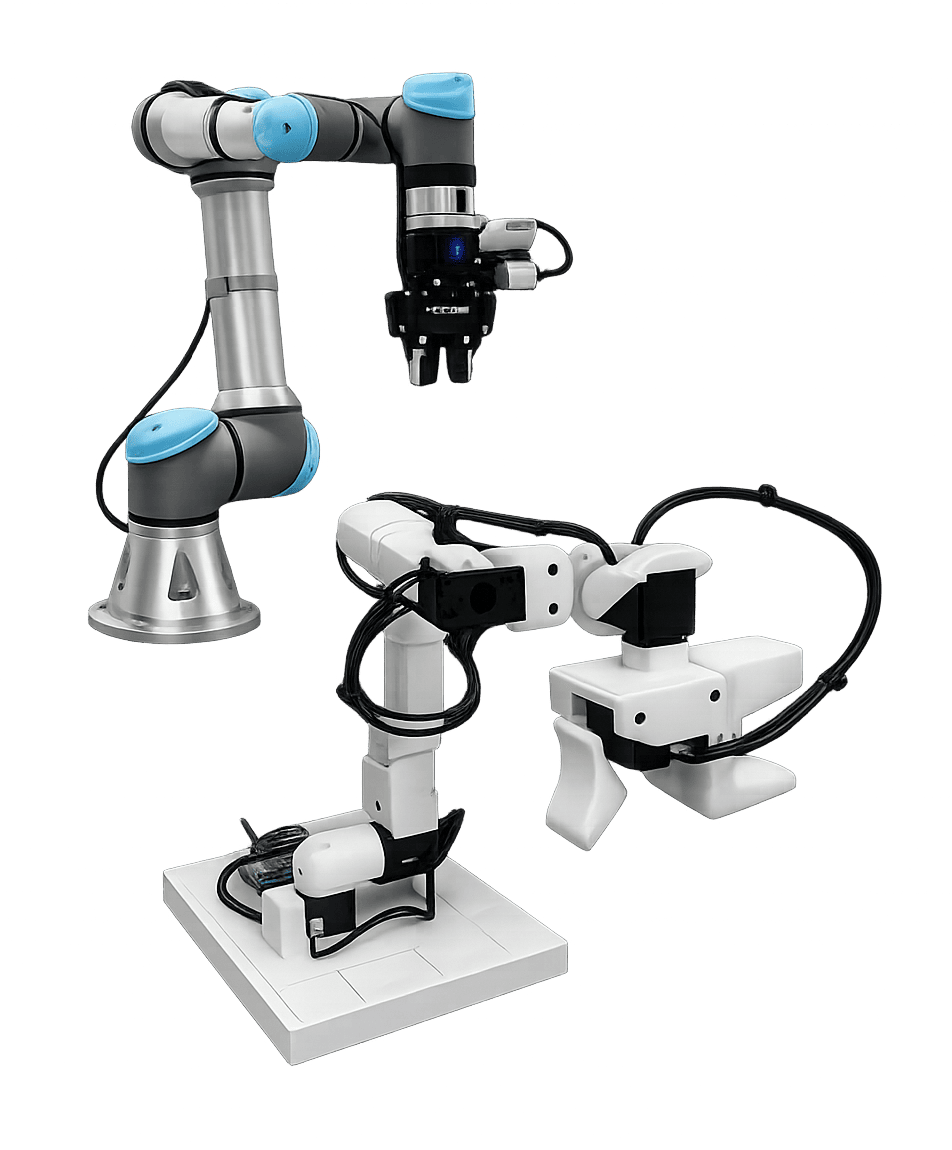
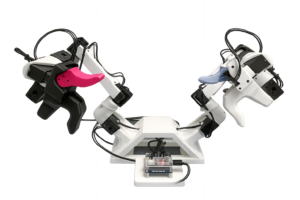
Gripper
Precise grip control
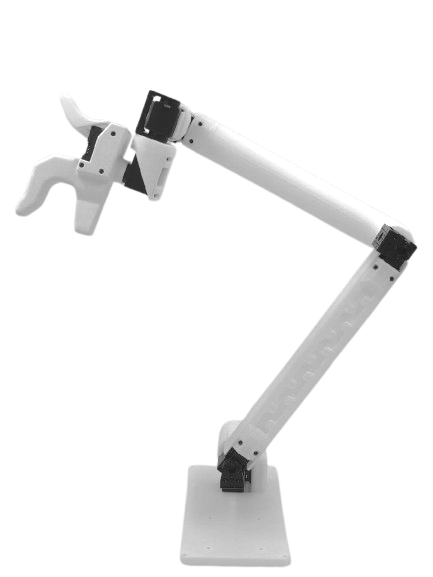
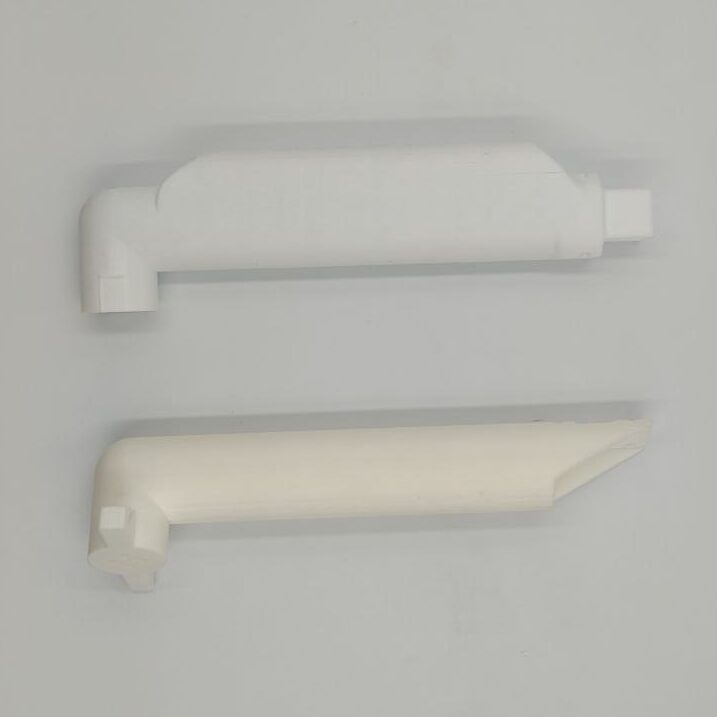
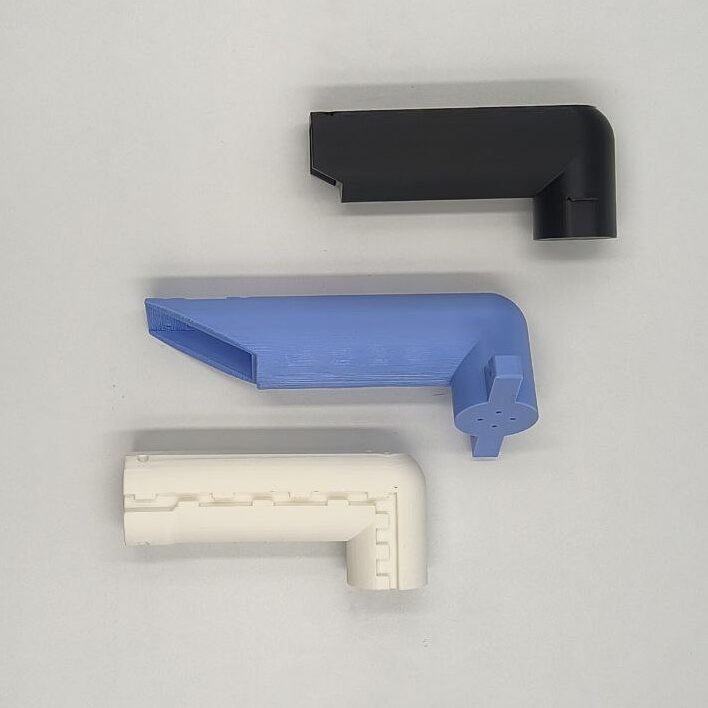
Arm link
3D-printed
Based on scaled-down Denavit–Hartenberg (DH) parameters
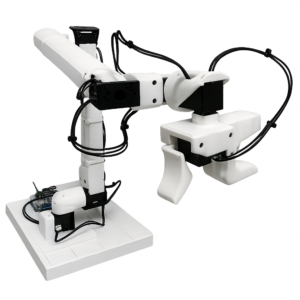
Base (UR5e)
Support the master arm
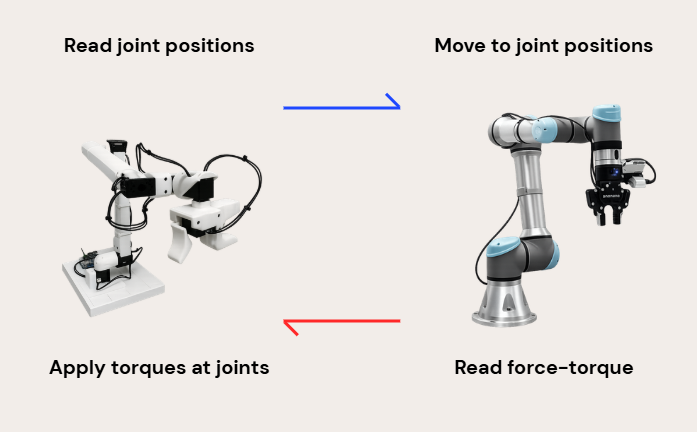
Dynamixel motor
Position encoding
Position and Current modes
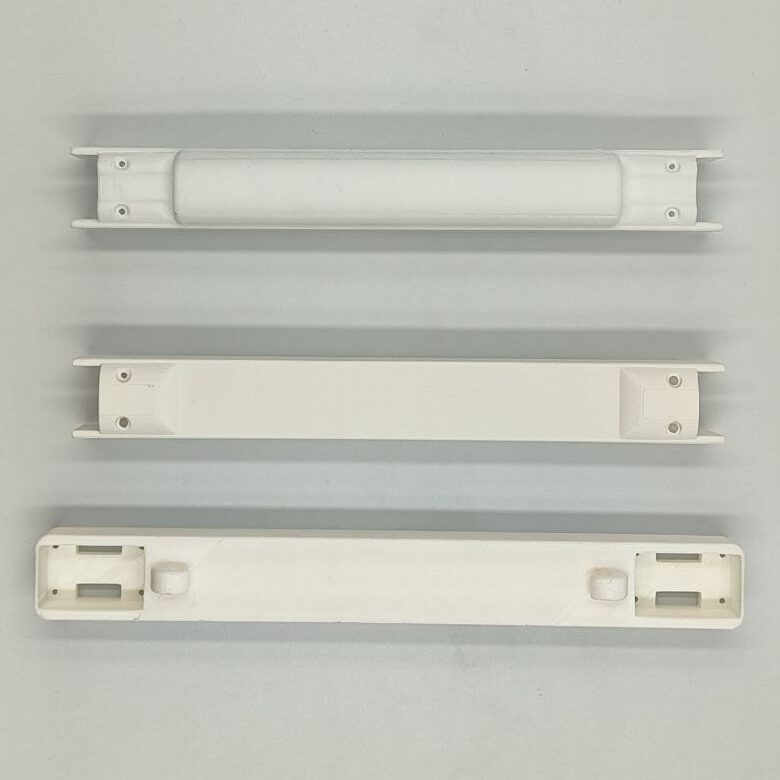
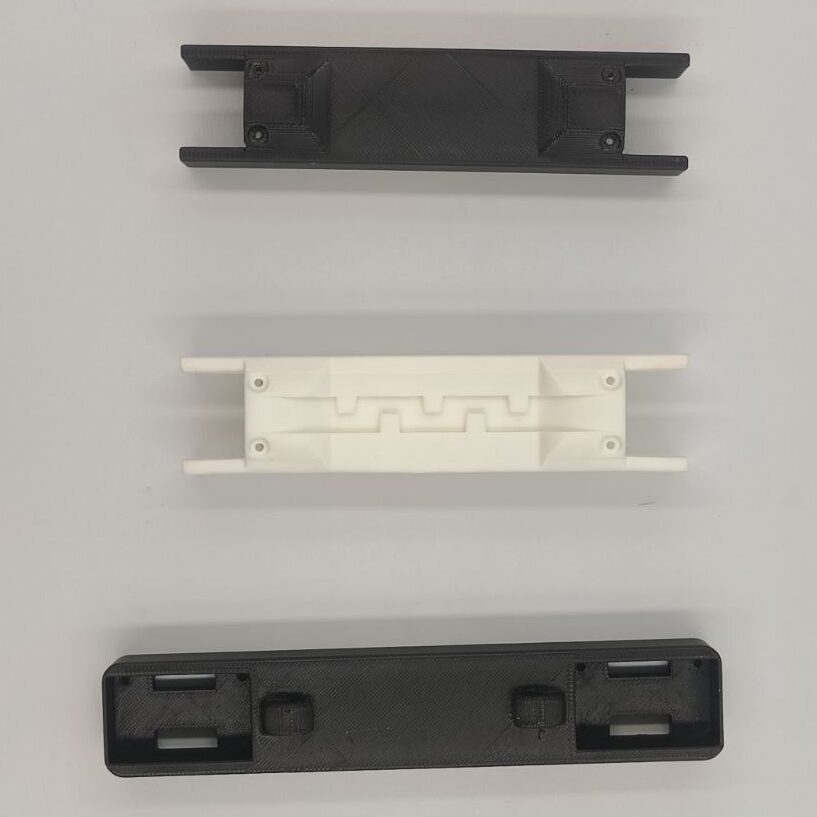
Brackets and Washers
Improve rigidity for force feedback
U2D2 board
Power and communication interface


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}