Maritime pilot transfers remain one of the most dangerous routine operations at sea, with ladder-based transfers accounting for a majority of reported incidents. Despite strict regulations, captains still rely heavily on visual judgment and experience when operating within sub-metre distances.
Through field observations and stakeholder discussions with Pyxis Maritime, we identified that limited visibility, lack of precise distance awareness, and high cognitive load are key challenges during close-range manoeuvres. Captains must simultaneously manage vessel positioning, monitor the pilot ladder, and coordinate with crew under dynamic sea conditions.
Existing maritime systems are designed for large-scale navigation and fail to provide real-time, close-proximity guidance, highlighting a critical gap for a solution that enhances situational awareness without disrupting existing workflows.
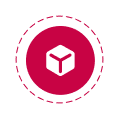
Pilot transfer operations remain one of the most hazardous manoeuvres in maritime environments, requiring precise coordination between a pilot vessel and a moving cargo ship within sub-metre distances. Despite strict regulations, captains rely heavily on visual judgment and experience, often operating with limited visibility and no real-time instrumentation for distance or alignment. This creates a critical gap where human error, blind spots, and dynamic sea conditions significantly increase the risk of misalignment, collision, or unsafe boarding.
Pyxis Co-Pilot addresses this gap by introducing a real-time, onboard guidance system that enhances the captain’s situational awareness during pilot transfer operations. By integrating computer vision, LiDAR sensing, and a phase-aware dashboard, the system provides accurate distance measurements, ladder tracking, and alignment feedback in real time. Designed to operate fully on edge devices, it delivers low-latency, reliable guidance without requiring vessel modification or internet connectivity—augmenting human decision-making to enable safer, smoother, and more controlled manoeuvres.

Pyxis Co-Pilot enhances pilot transfer operations through a real-time, edge-powered system that combines AI, sensors, and intuitive visualization to support safer and more precise decision-making at sea.

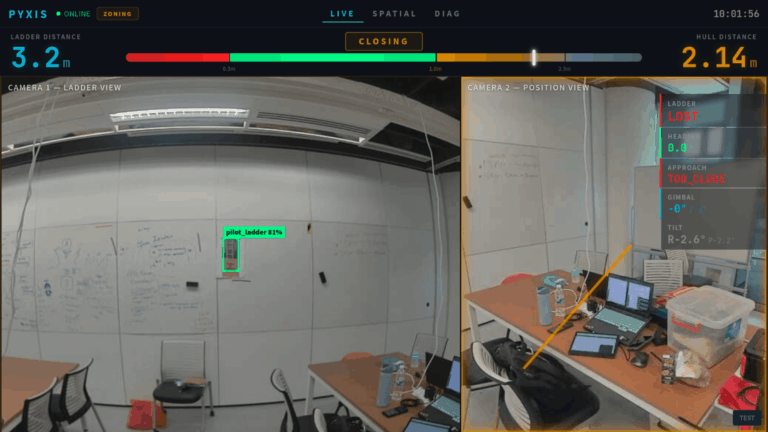
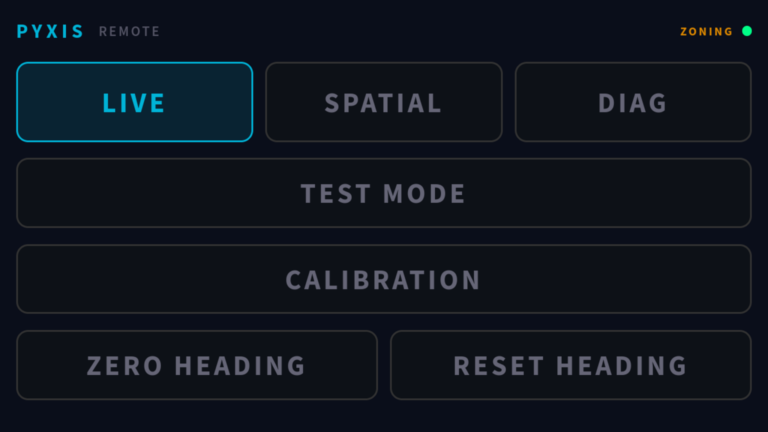
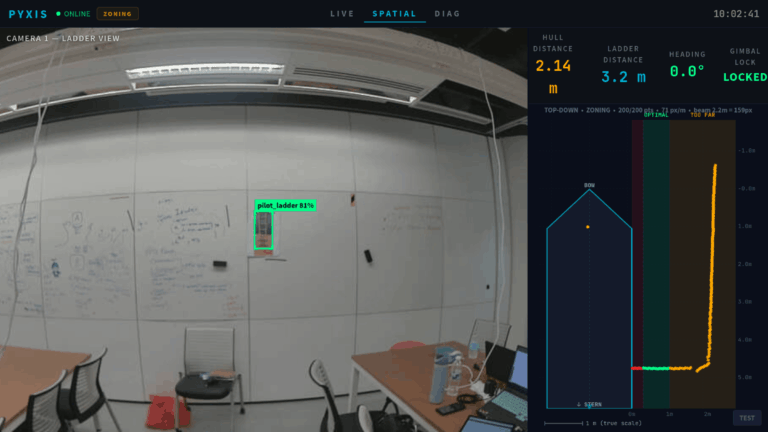
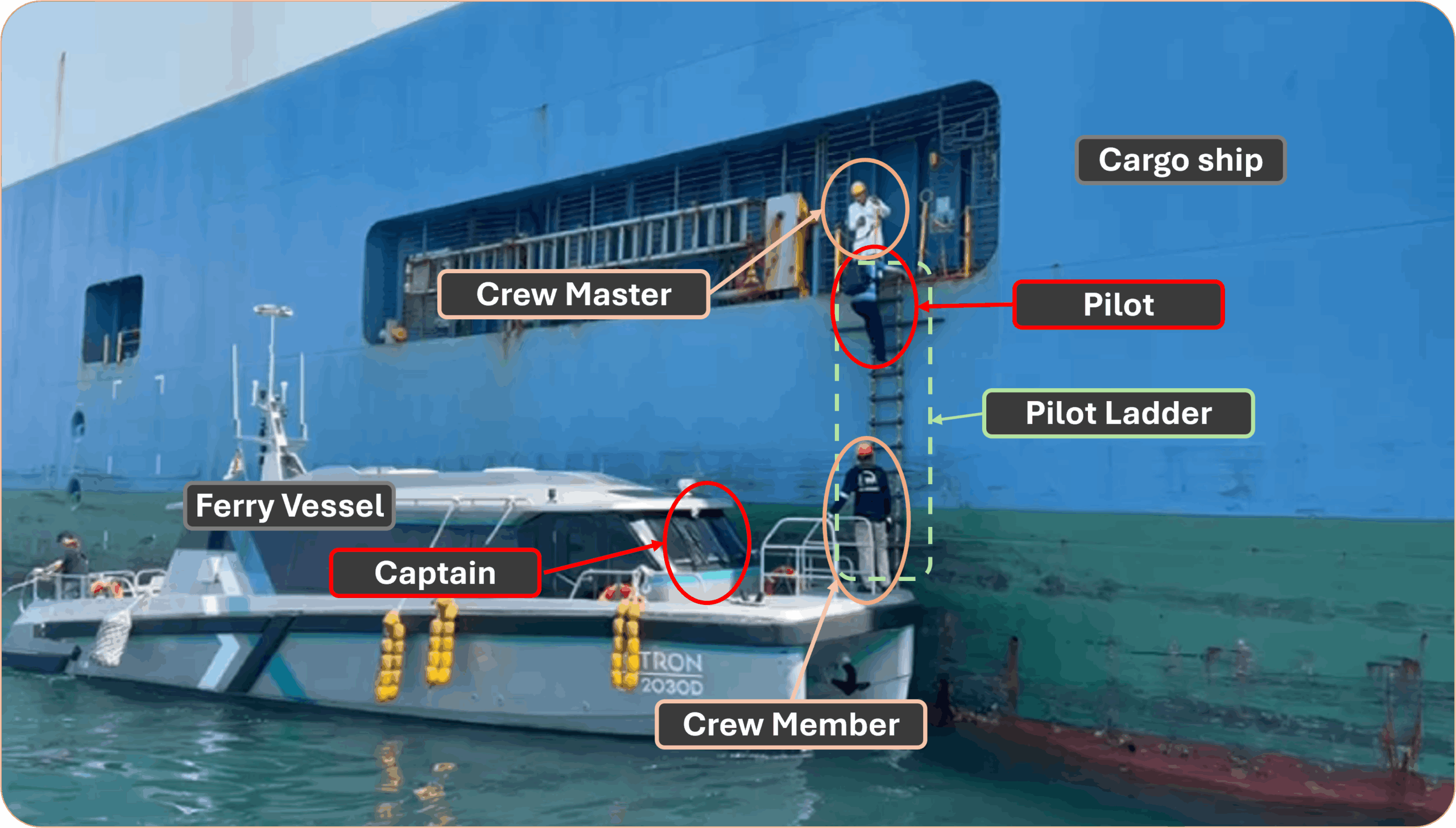
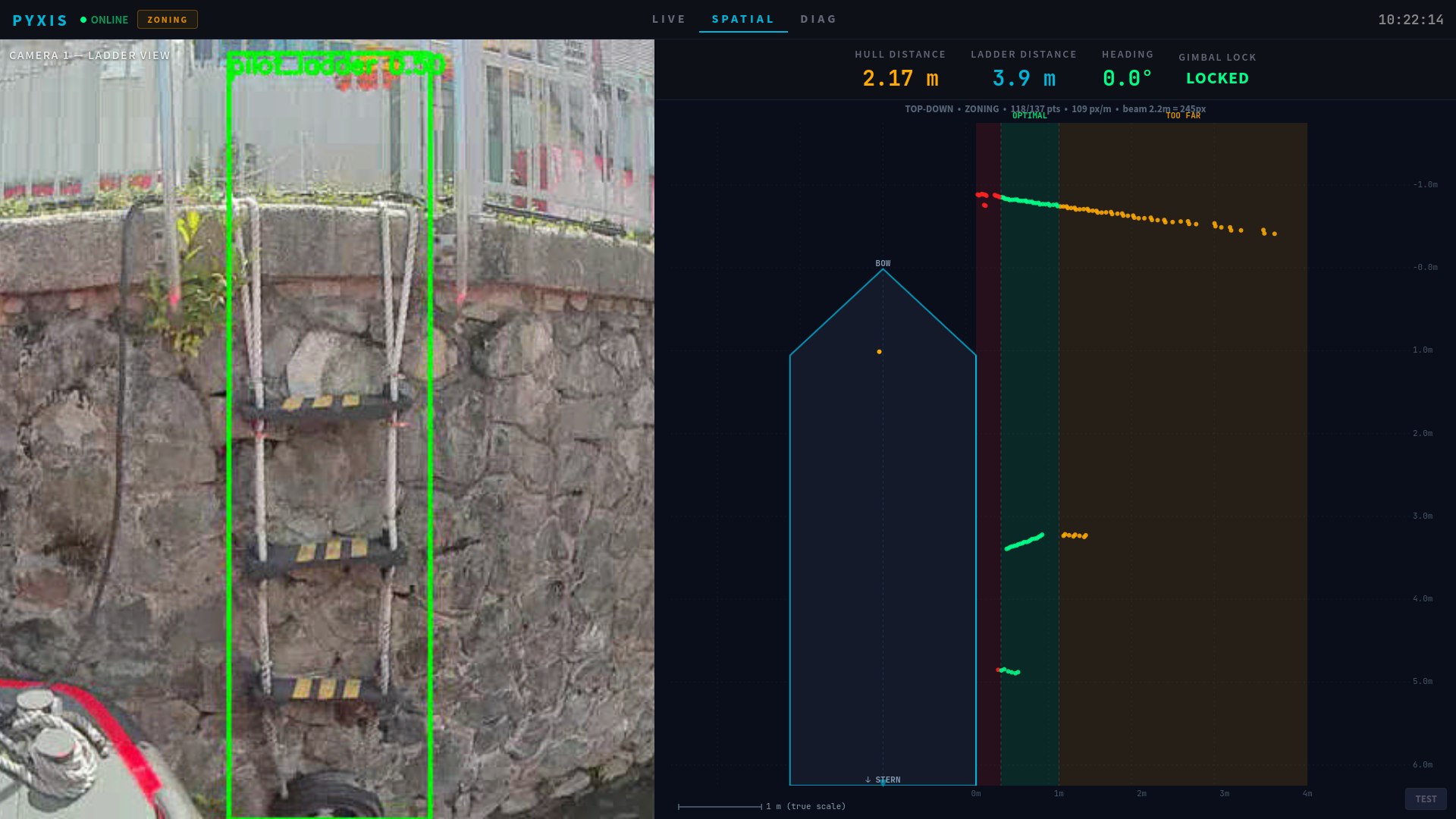
Pyxis Co-Pilot operates as an integrated real-time guidance system onboard the pilot vessel. Once activated, cameras and LiDAR continuously capture environmental data while onboard computing units process inputs locally. The system automatically adapts across operational phases—Approach, Zoning, and Holding—providing context-aware guidance throughout the manoeuvre. All information is consolidated into a single dashboard, enabling the captain to monitor ladder position, vessel alignment, and proximity in real time for safer decision-making.
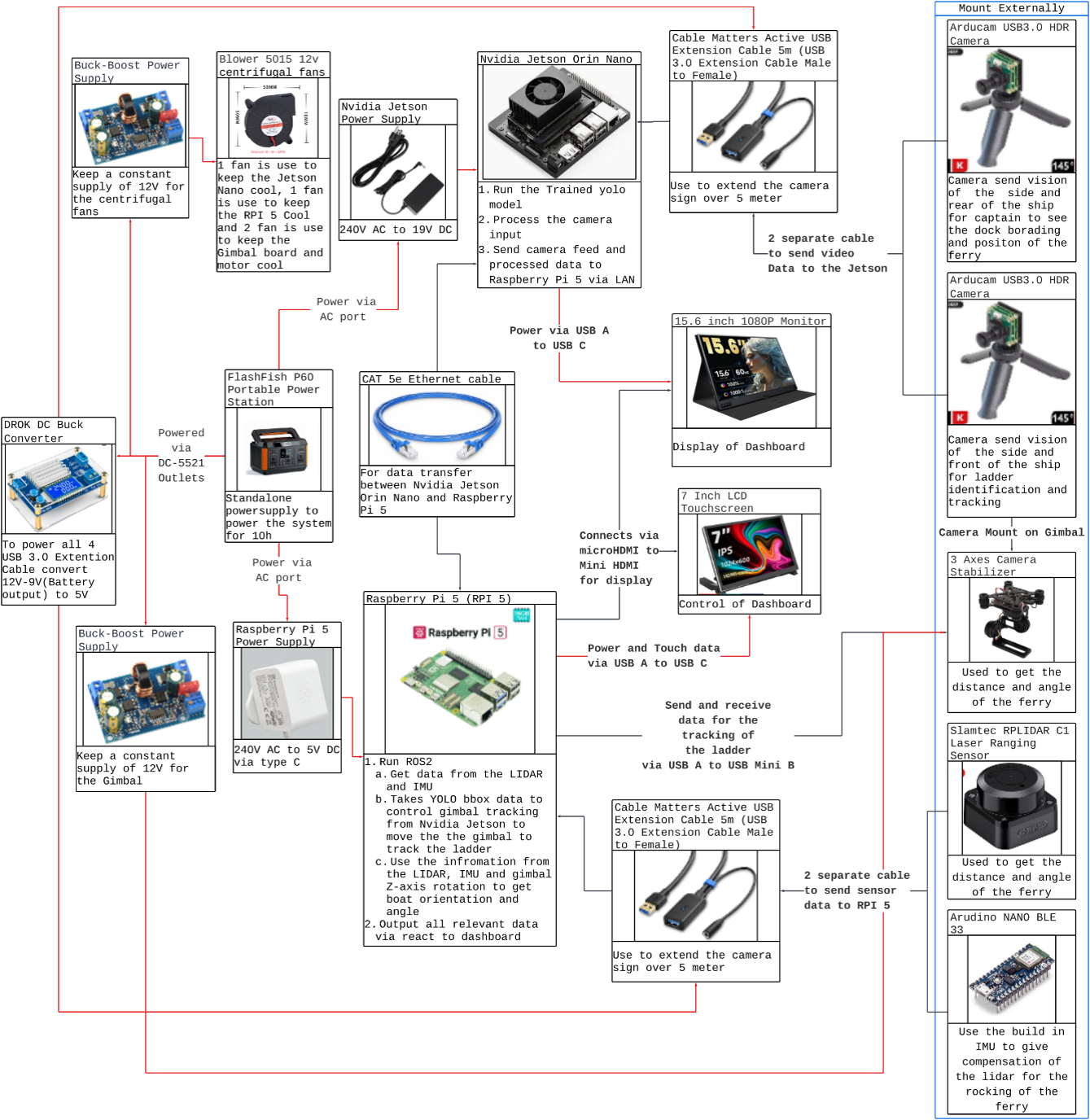
The system consists of a compact, fully standalone hardware setup designed for maritime environments. An NVIDIA Jetson processes computer vision models for ladder detection, while a Raspberry Pi integrates sensor data and controls the dashboard interface. LiDAR and IMU sensors provide accurate distance and orientation measurements, and dual cameras mounted on a stabilised gimbal ensure reliable tracking under motion. Powered by a portable battery system, Pyxis Co-Pilot operates independently without requiring vessel modification or internet connectivity.
Pyxis Co-Pilot leverages a custom-built computer vision pipeline tailored for maritime pilot transfer scenarios. Due to the absence of public datasets, the team developed a scalable workflow combining data collection, auto-labelling, and human validation. Models are trained to detect pilot ladders and adapt to different environments, achieving significant improvements in detection accuracy. This pipeline enables continuous iteration and deployment across new vessels, forming the foundation for a robust and transferable maritime AI system.