Proj S10 – Equatorial Space – Flight Controller for Rocketry
Introducing Proj S10 – Equatorial Space – Flight Controller for Rocketry
ESS-SUTD FCS is a proof-of-concept fault-tolerant computing architecture demonstrator designed to be spaceflight-capable for low-Earth orbit missions at a fraction of the cost of traditional avionics. The system integrates an embedded architecture informed by spaceflight-heritage designs with commercial off-the-shelf components. Development is supported by a comprehensive software ecosystem built on NASA’s flight software framework. The resulting platform enables a configurable software-in-the-loop simulation environment that demonstrates robust failure tolerance and accurate flight-path alignment.
Team members
Mervyn Wong Ju-Liang (EPD), Ang Lexuan (ESD), Pan Ziyue (EPD), Anika Ajay Handigol (ISTD), Quek Kai Ling Jacinta (ESD), Cherian Sarah (EPD), Siew Rui Ze, Zayne (ISTD)
Instructors:
Wai Lee
Writing Instructors:
Belinda Seet
Dominic Edmund Kim San Quah
Hard-Launching Into Space Product Demonstration
Value Proposition
Lower the Barrier of Entry Into Space
Deliver a cost-effective and reliable flight computing architecture and leverage on commercially-available hardware rather than expensive custom-built avionics
Accelerate Innovation
Foster an environment that enables rapid prototyping, simulation, and testing, thereby accelerating development cycles for future launch vehicles
Strengthen Singapore's Broader Space Ecosystem
Contribute reusable research, tools and methodologies that will help advance spaceflight capabilities and accelerate development of local space technologies
Design Philosophy
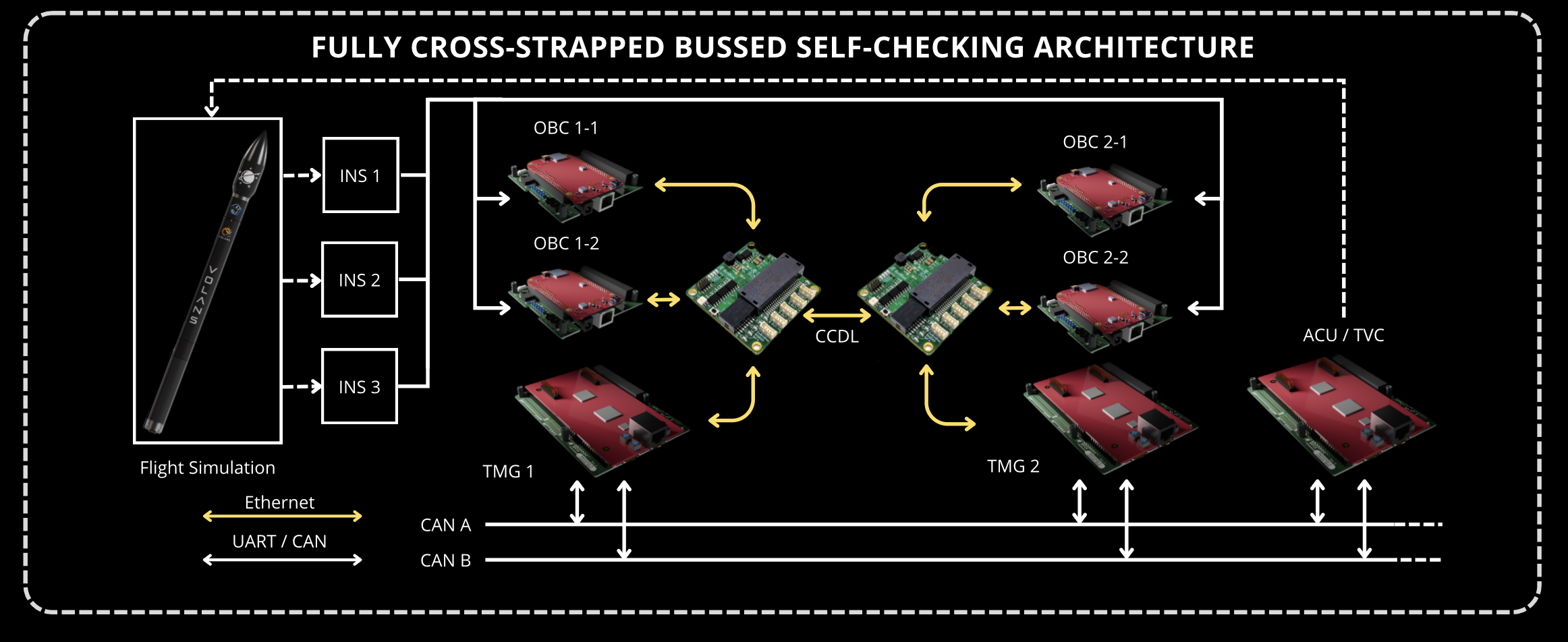
Navigational Redundancy
Multiple navigational data providers and channels
Communication Redundancy
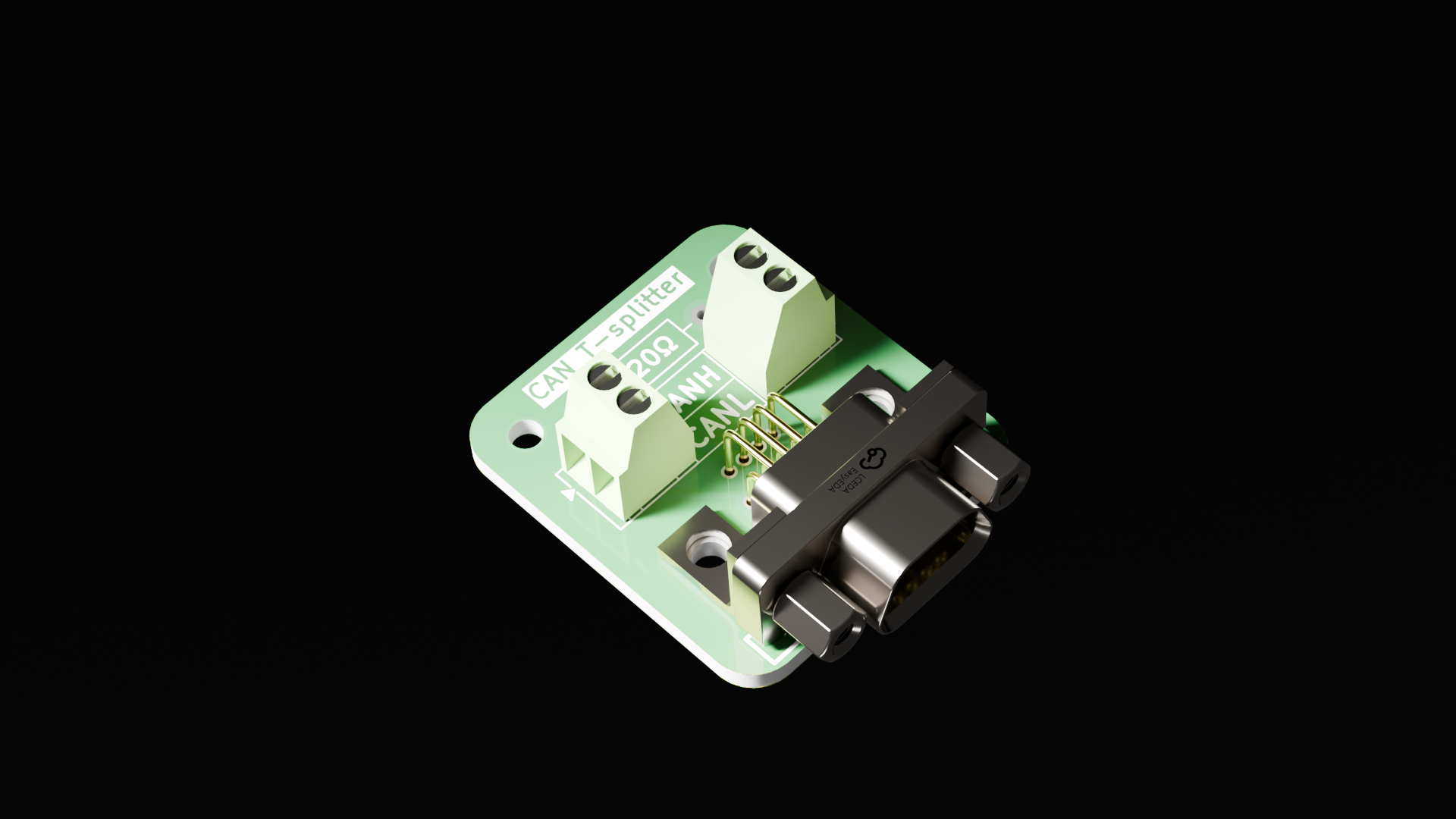
Multiple intra-system communication channels including Ethernet and CAN
Computational Redundancy
Dual self-checking pairs; ability for error detection and hot standby
How might we design and validate a low-cost, fault-tolerant flight computing architecture that ensures reliable real-time navigation, guidance, and control for a future orbital-class launch vehicle?
Project Architecture
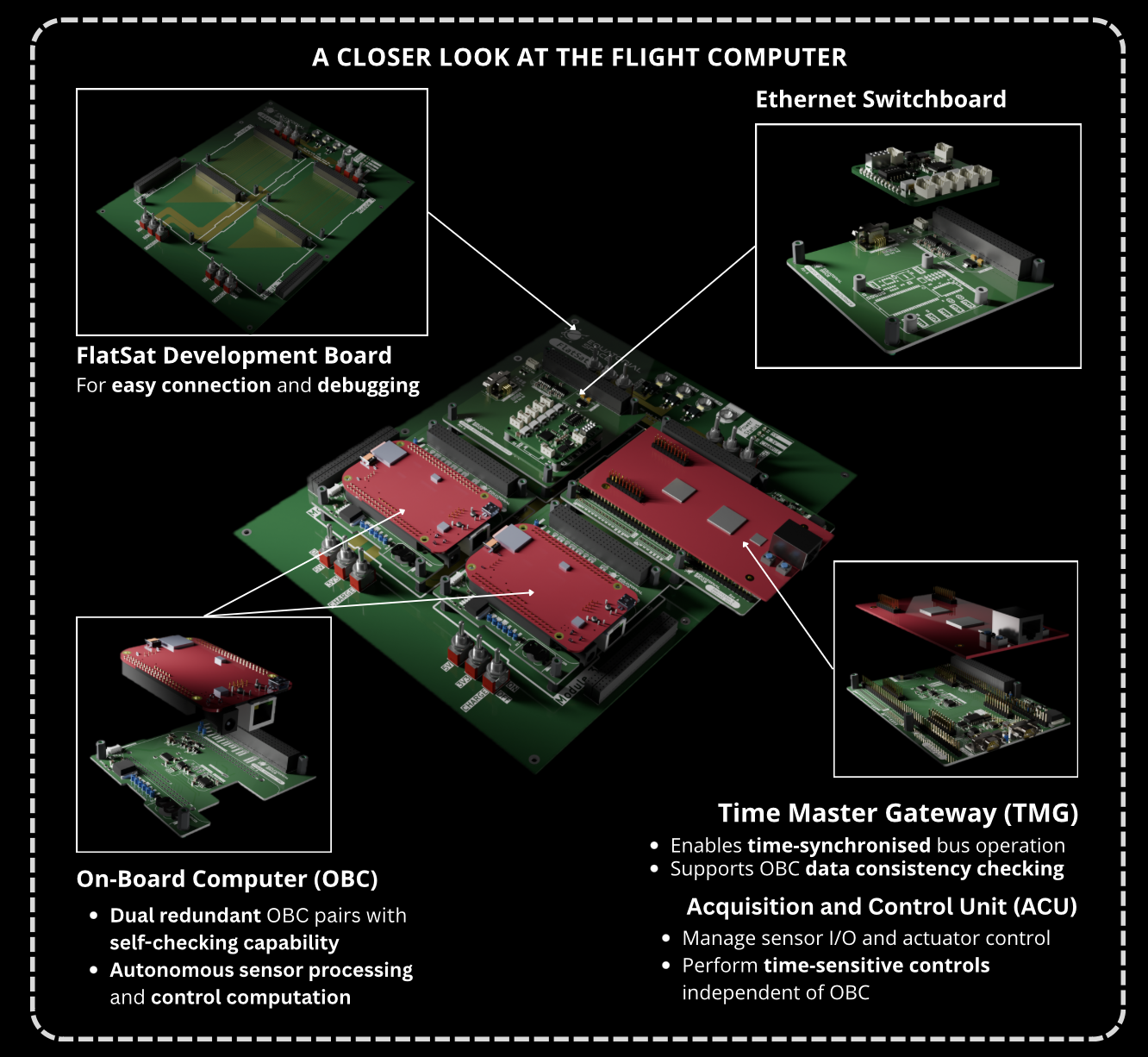
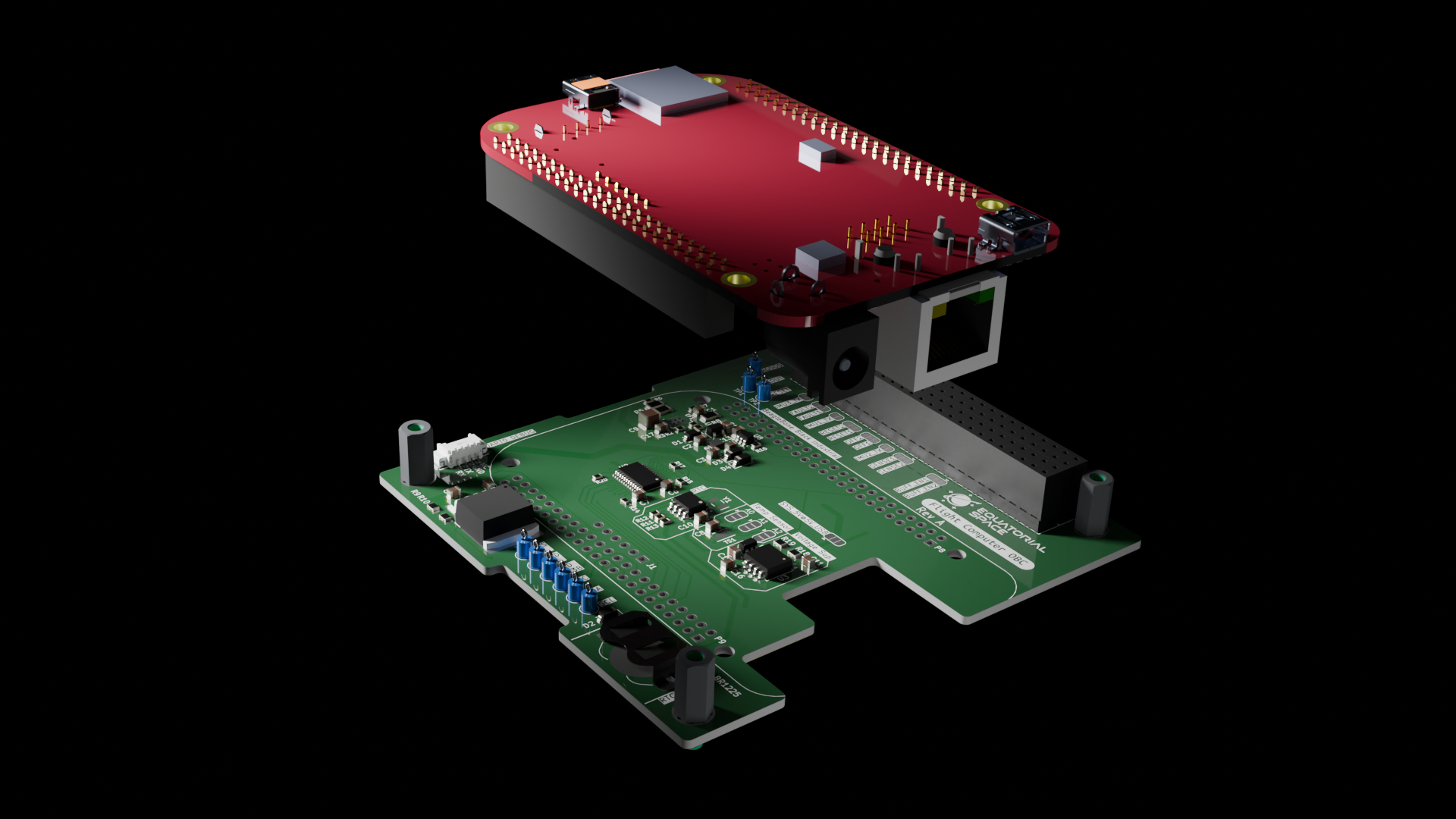
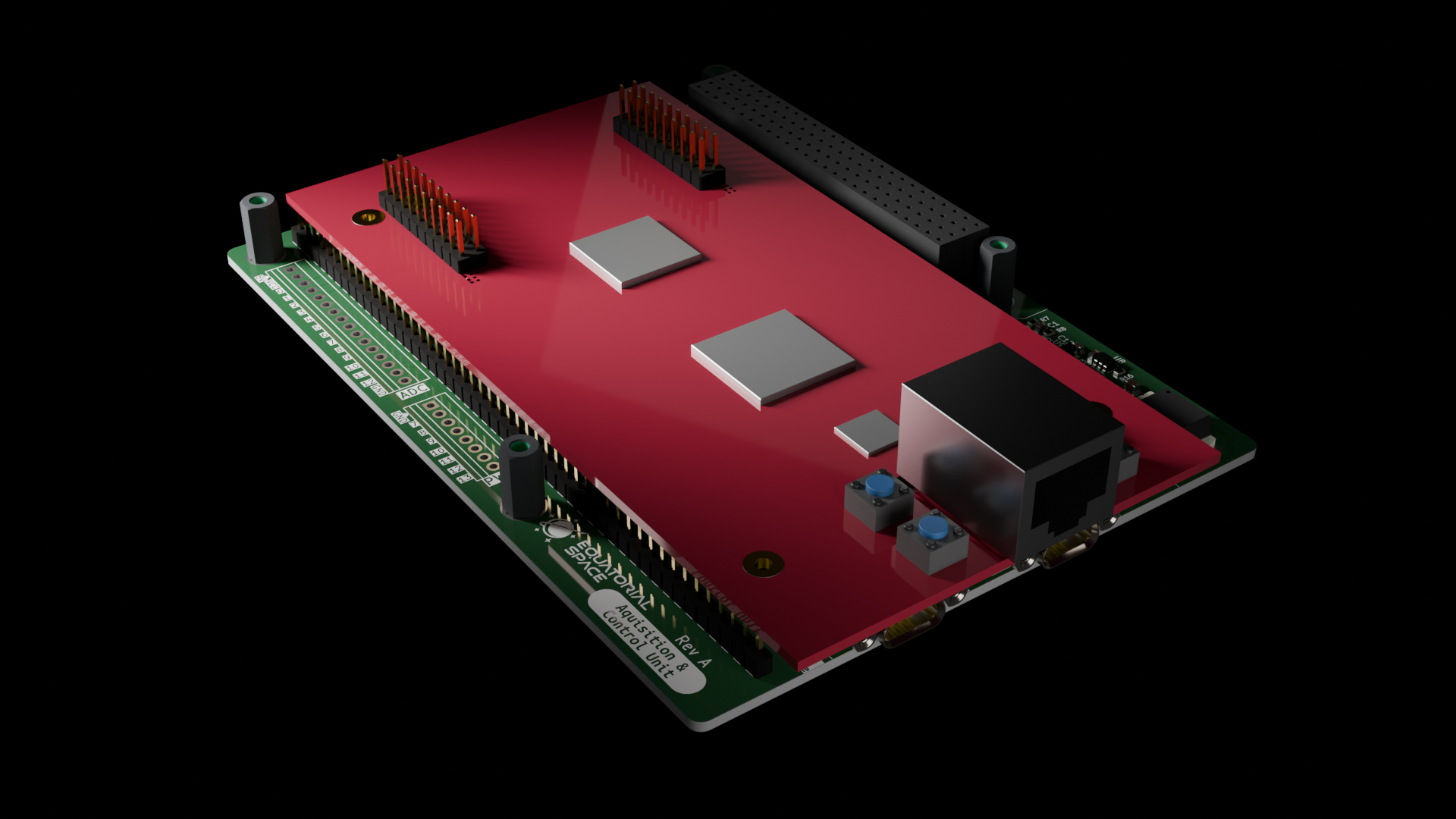
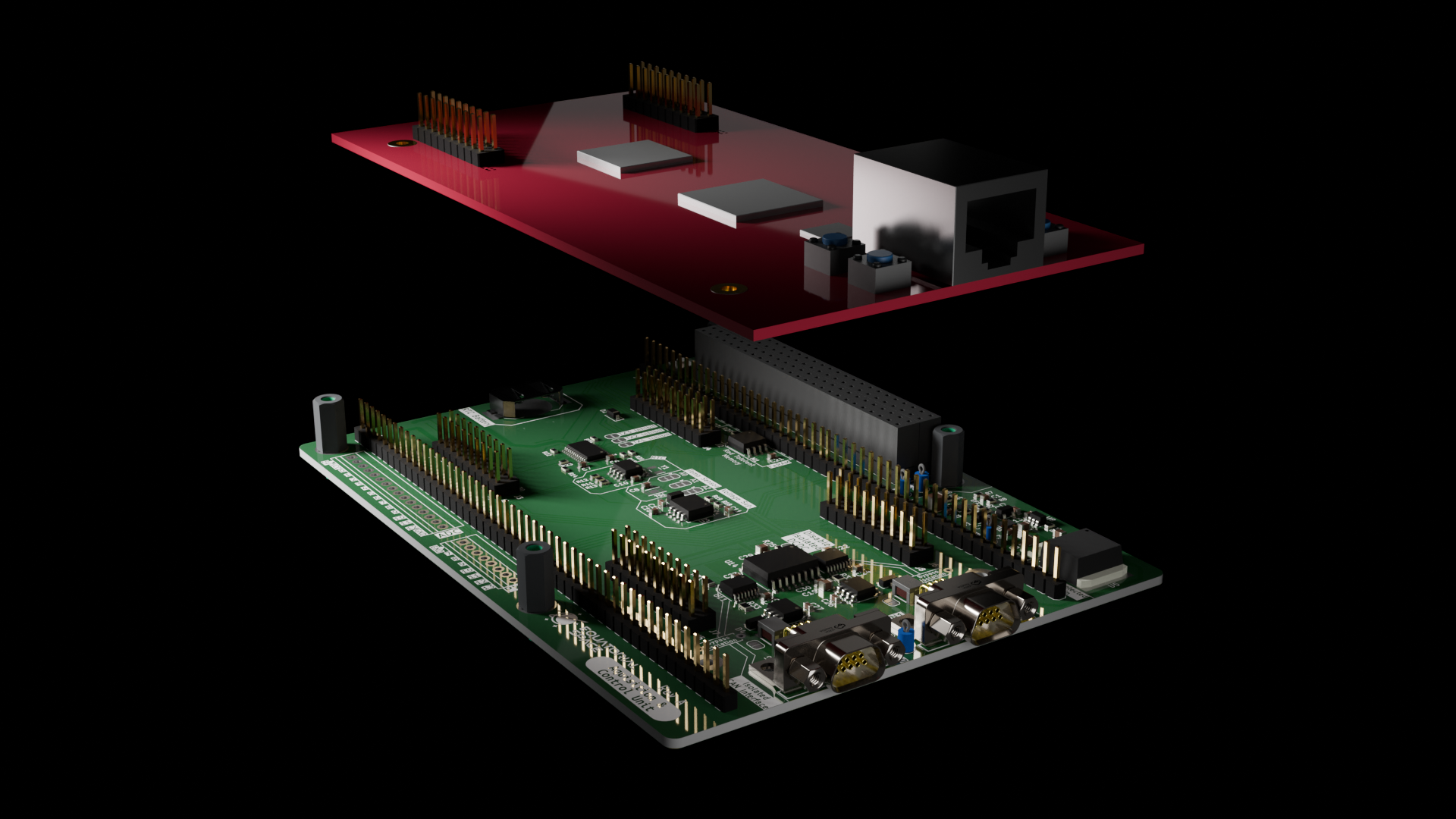
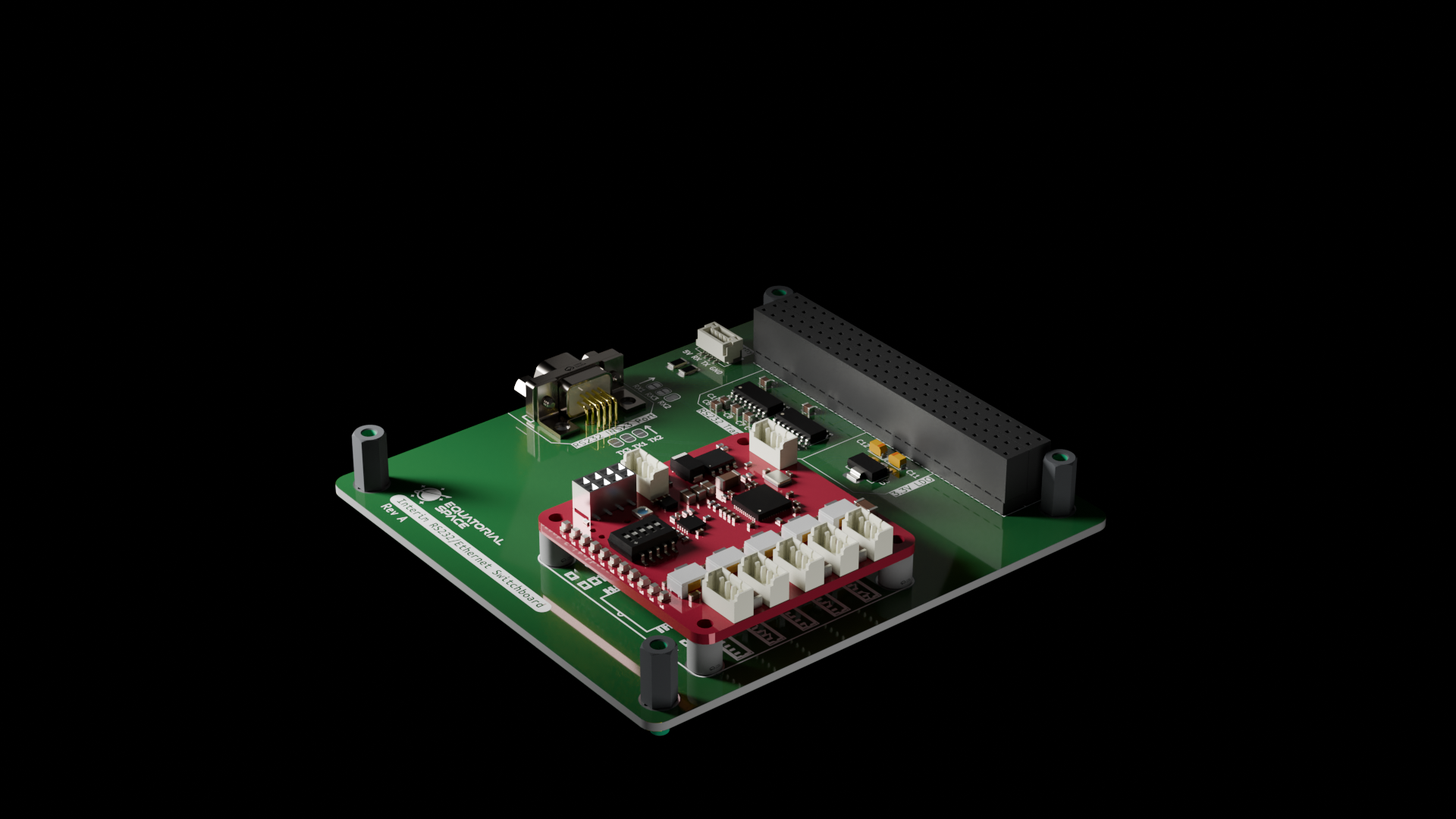
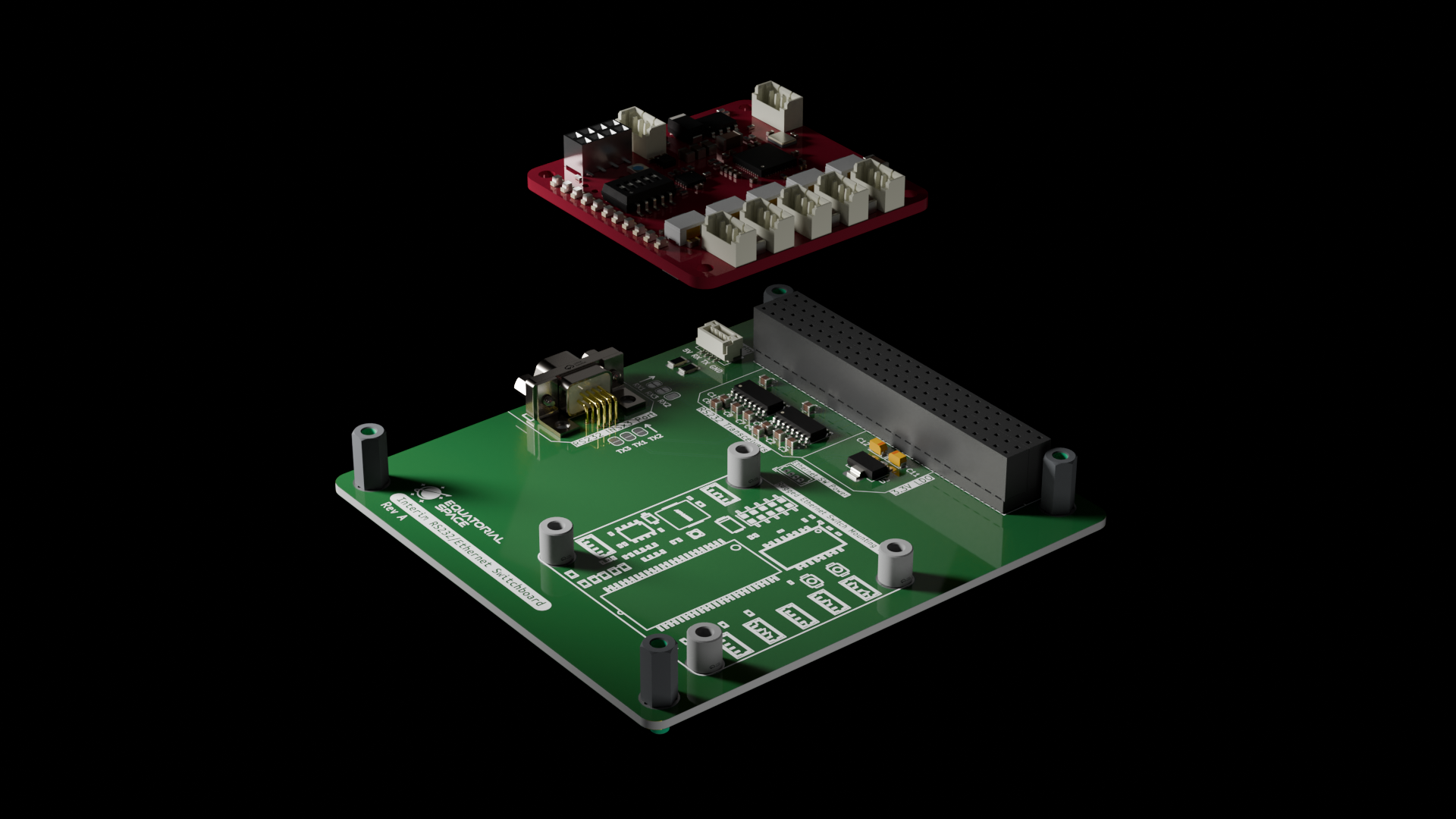
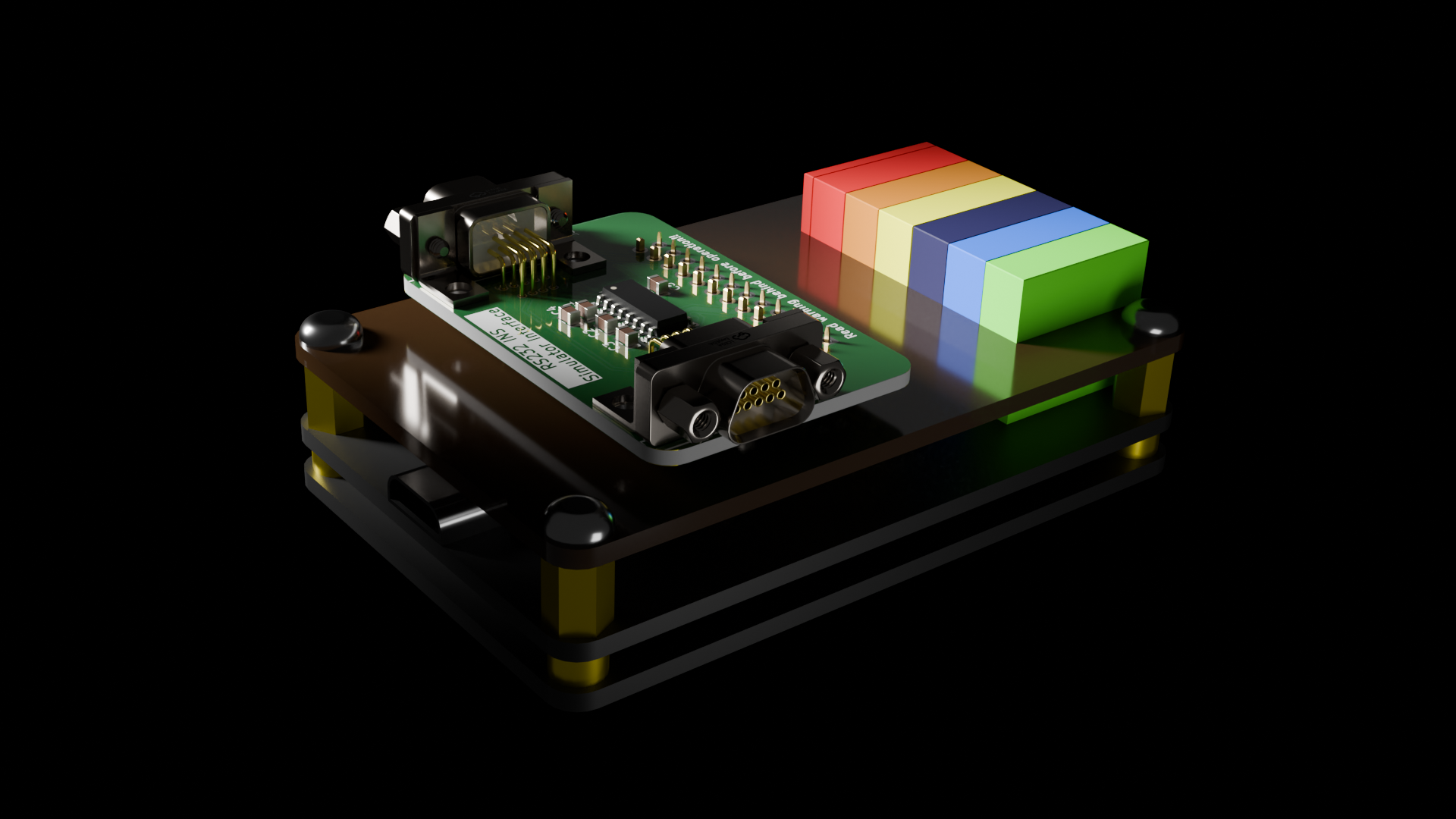
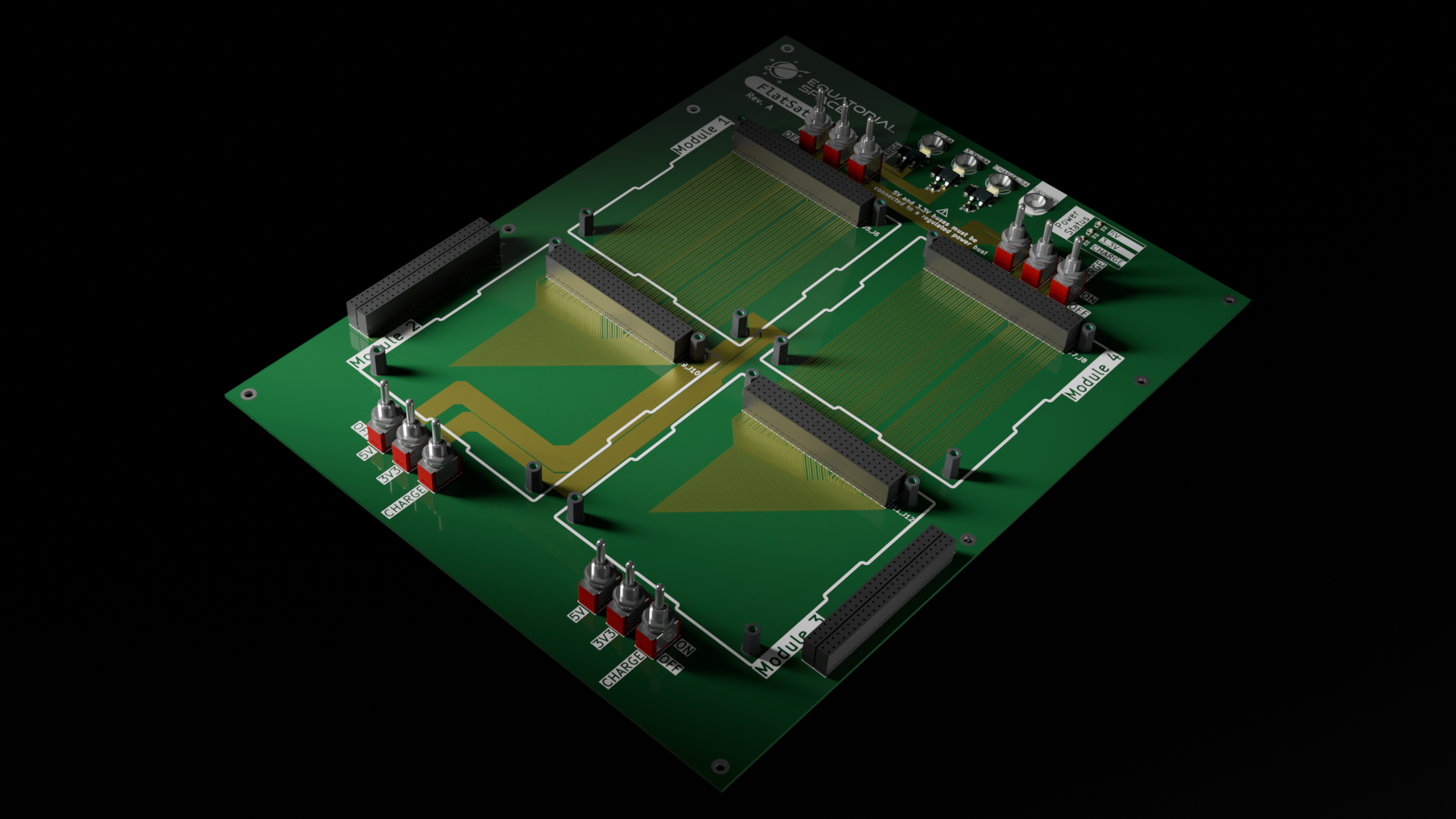
Hardware Solution
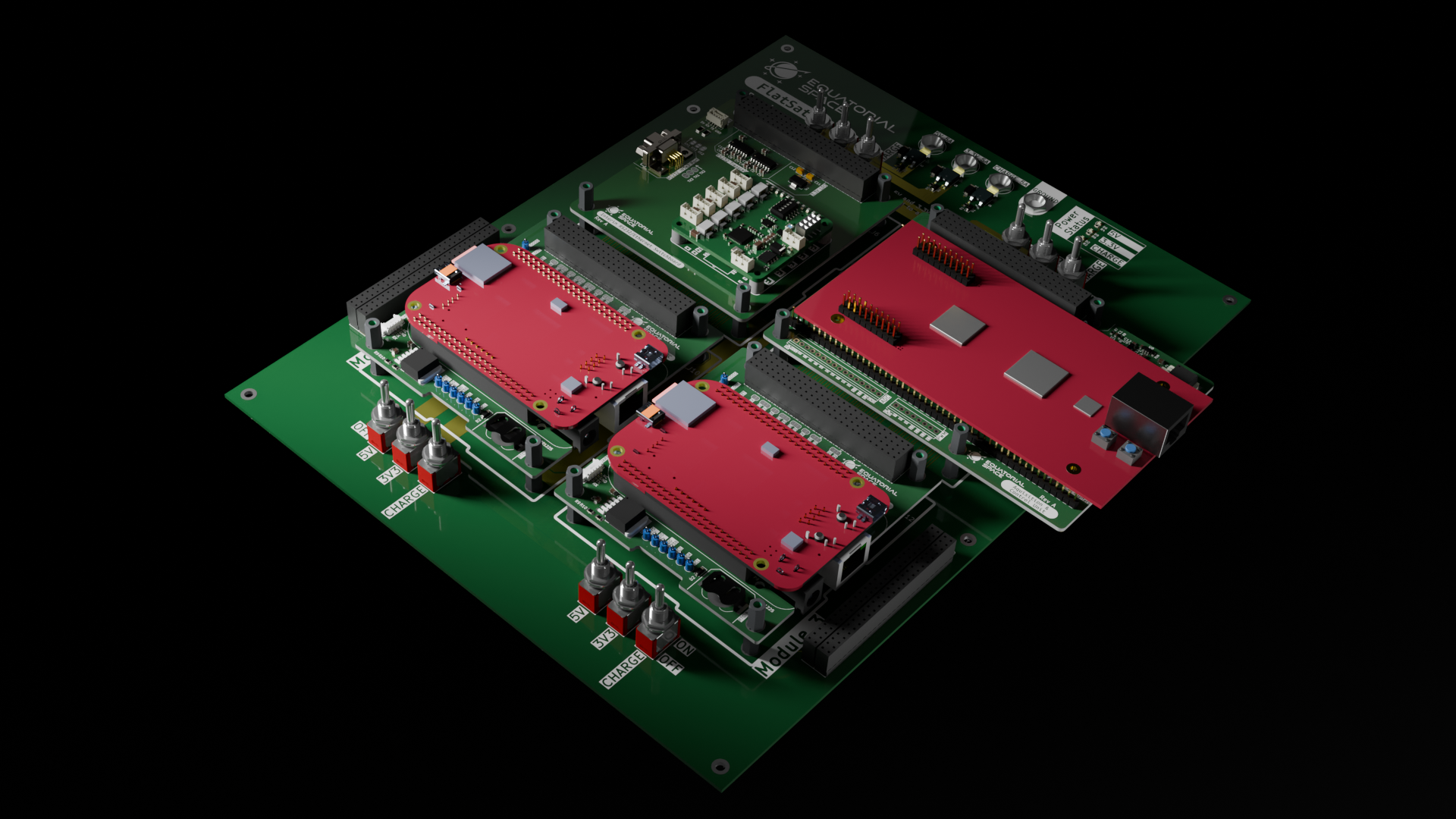
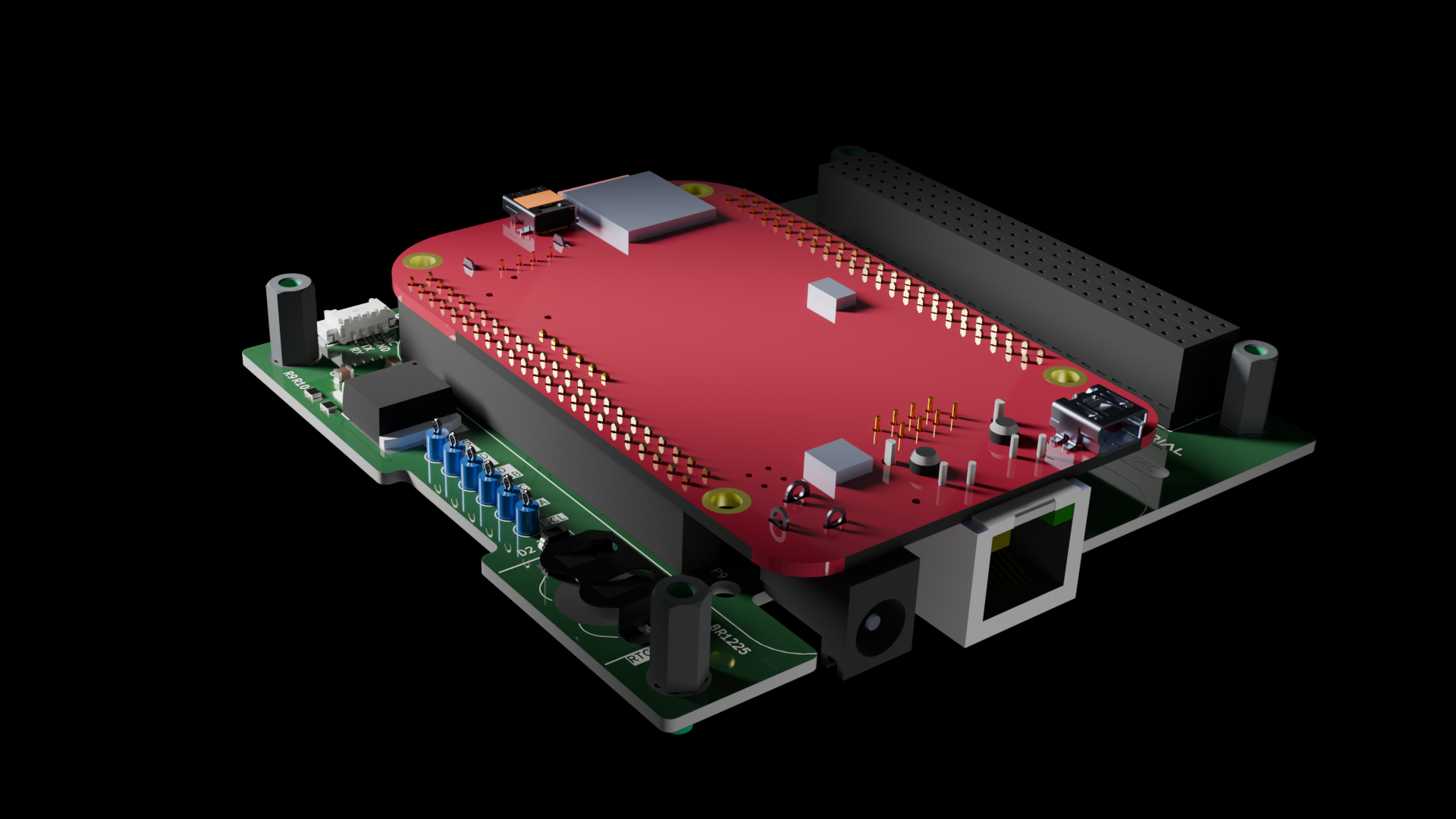
Hardware Showcase
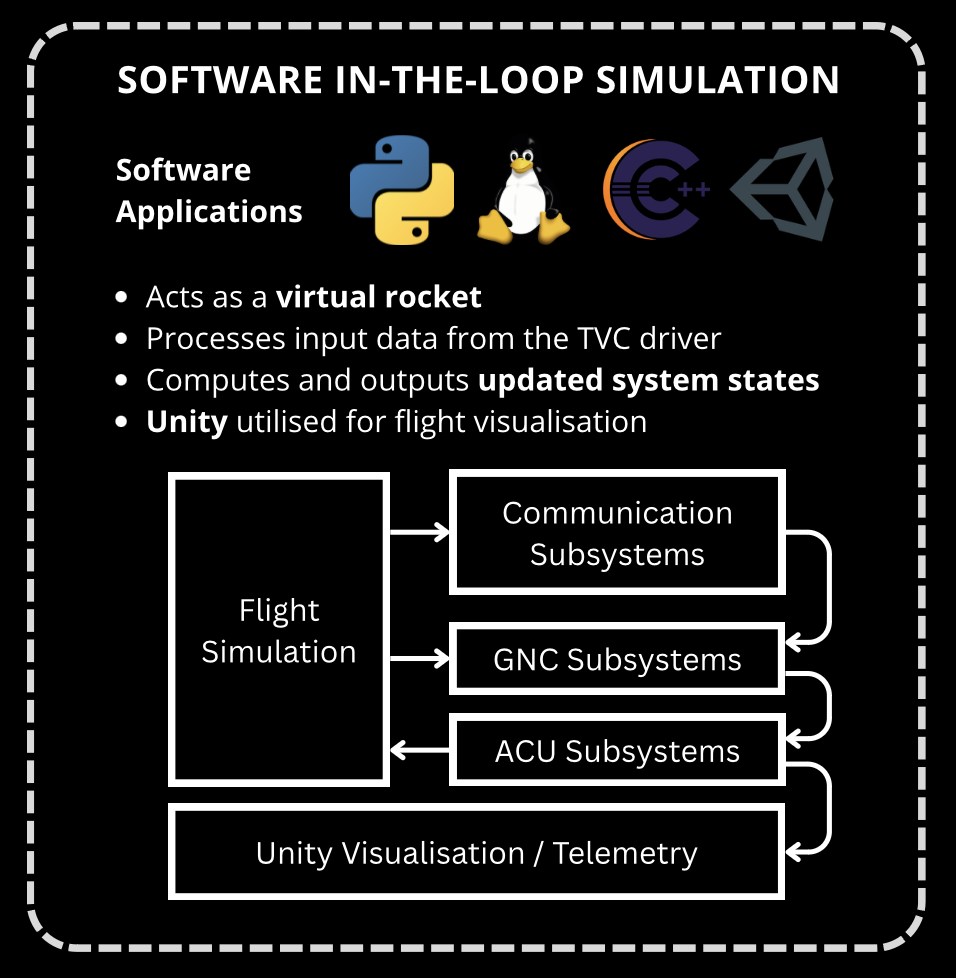
Software Solution
Flight Path Demonstration in Unity
In partnership with :
Acknowledgements
Our team would like to express our sincere gratitude to Equatorial Space Systems Pte Ltd for the invaluable opportunity to contribute to the design of their orbital rocket. Their support, openness, and guidance significantly enriched our learning experience, and their mentorship was instrumental in making this project possible.
We would like to extend our heartfelt gratitude to Prof. Wai Lee for his invaluable guidance, mentorship, and insightful advice throughout this project. His expertise played a crucial role in shaping both the direction and quality of our work. We also sincerely thank Prof. Zhao Na (SUTD, ISTD) for her valuable input and domain expertise, as well as our writing instructors, Dominic Quah and Belinda Seet (SUTD, CWR), for their guidance and support in refining our communication and presentation.
At Singapore University of Technology and Design (SUTD), we believe that the power of design roots from the understanding of human experiences and needs, to create for innovation that enhances and transforms the way we live. This is why we develop a multi-disciplinary curriculum delivered v ia a hands-on, collaborative learning pedagogy and environment that concludes in a Capstone project.
The Capstone project is a collaboration between companies and senior-year students. Students of different majors come together to work in teams and contribute their technology and design expertise to solve real-world challenges faced by companies. The Capstone project will culminate with a design showcase, unveiling the innovative solutions from the graduating cohort.
The Capstone Design Showcase is held annually to celebrate the success of our graduating students and their enthralling multi-disciplinary projects they have developed.