

02. DEPLOYMENT
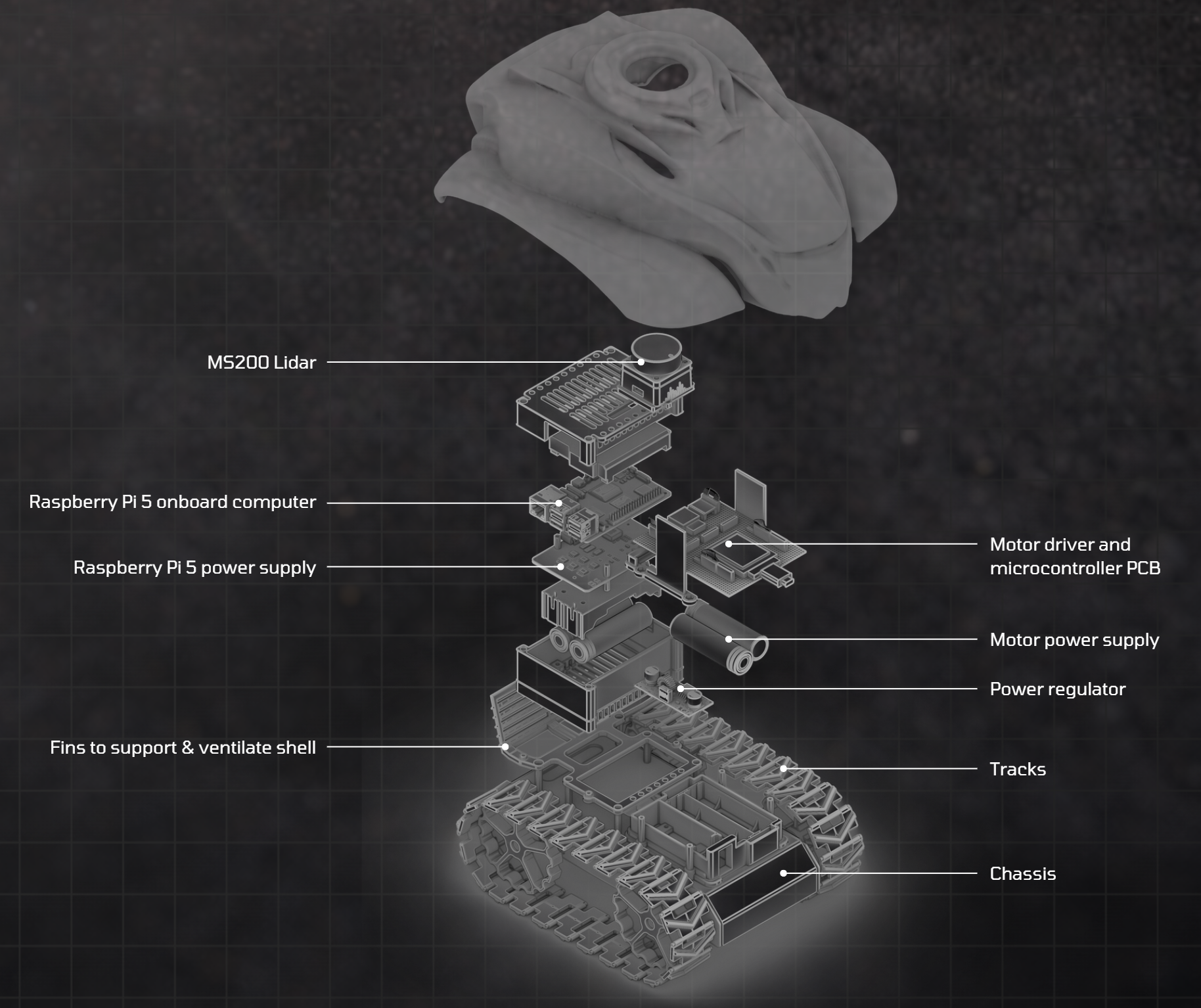
After multiple iterations, the team arrived at this exterior chassis design for its aerodynamic form, smooth organic lines, and porous structure that allows ventilation for the battery packs.

MATERIALITY
3D printing can be used for rapid prototyping and iterative development, offering faster turnaround compared to outsourced metal fabrication. The concept prototype uses PETG for its moderate heat resistance and safe printing properties, while the final deployment version adopts an aluminium sheet metal frame with heat-resistant coating for improved strength and durability.




BATTERY POWER SYSTEM
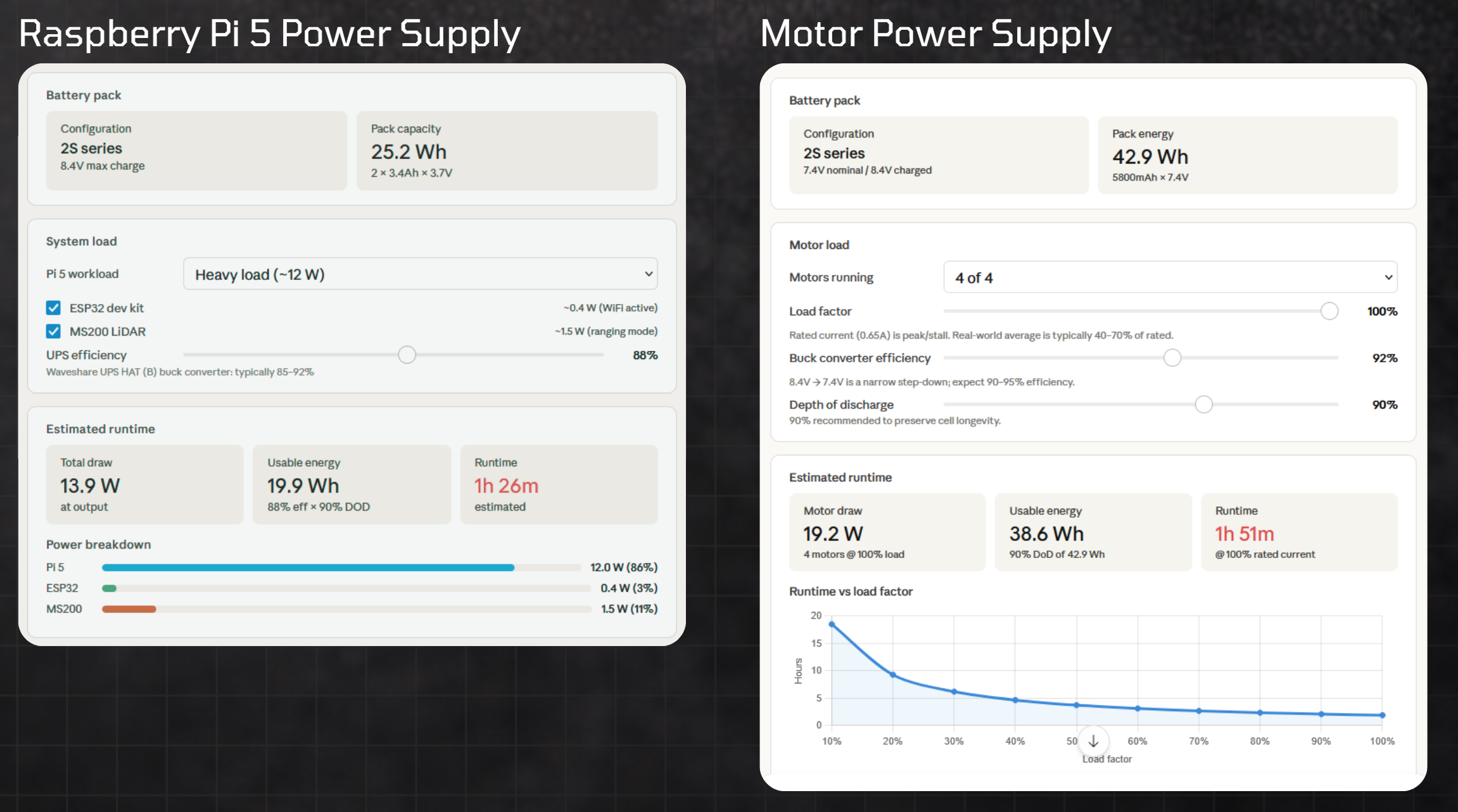
Under maximum load, the system achieves approximately 60 minutes of operation, with an additional 30-minute buffer for extended use.
03. EXPLORATION
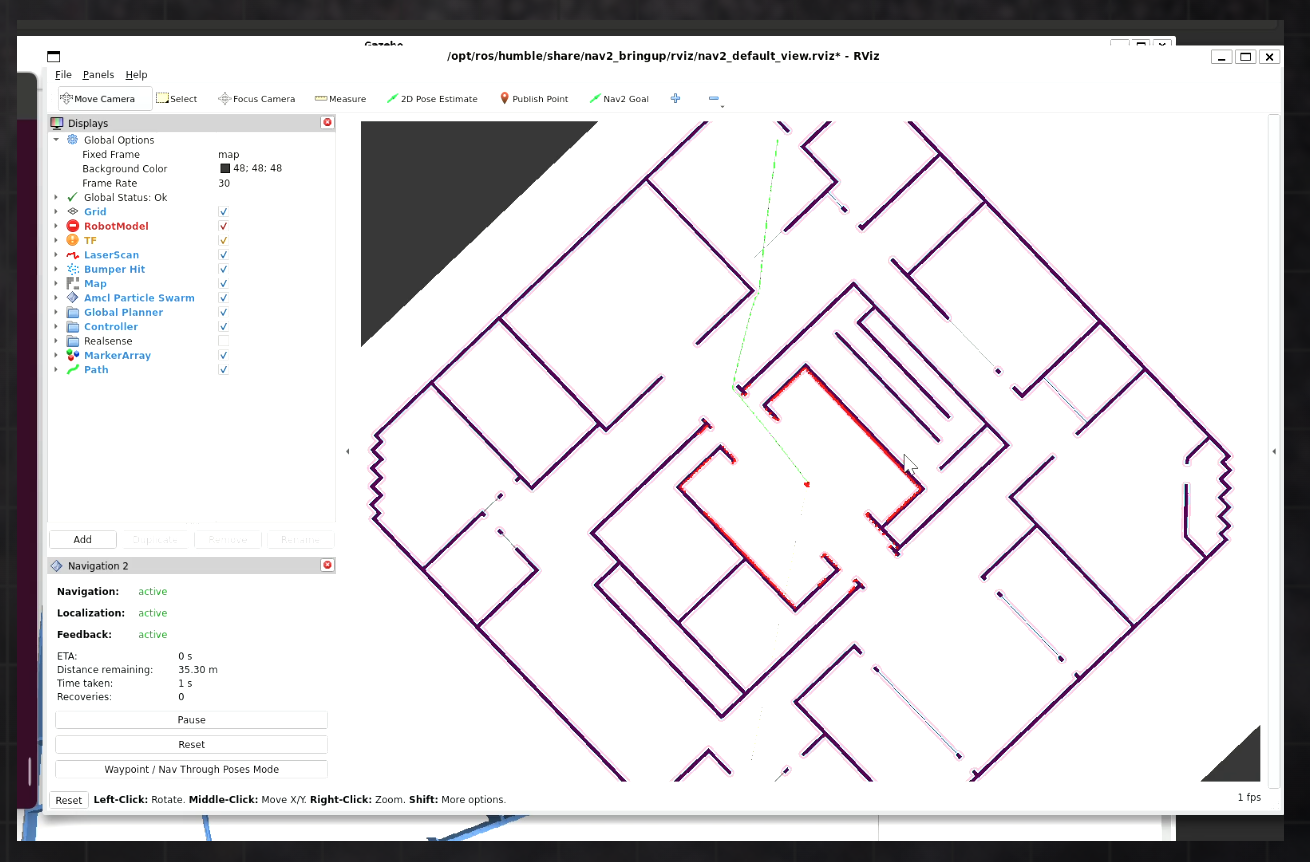
Designed for adaptability in unpredictable environments, the system supports both known and unknown conditions through a dual-mode navigation approach. In mapped environments, it uses structured navigation for efficient path planning and localisation, while in unknown or compromised spaces, it switches to reactive, sensor-driven exploration that requires no prior data. This ensures continuous operation without interruption, regardless of available information.
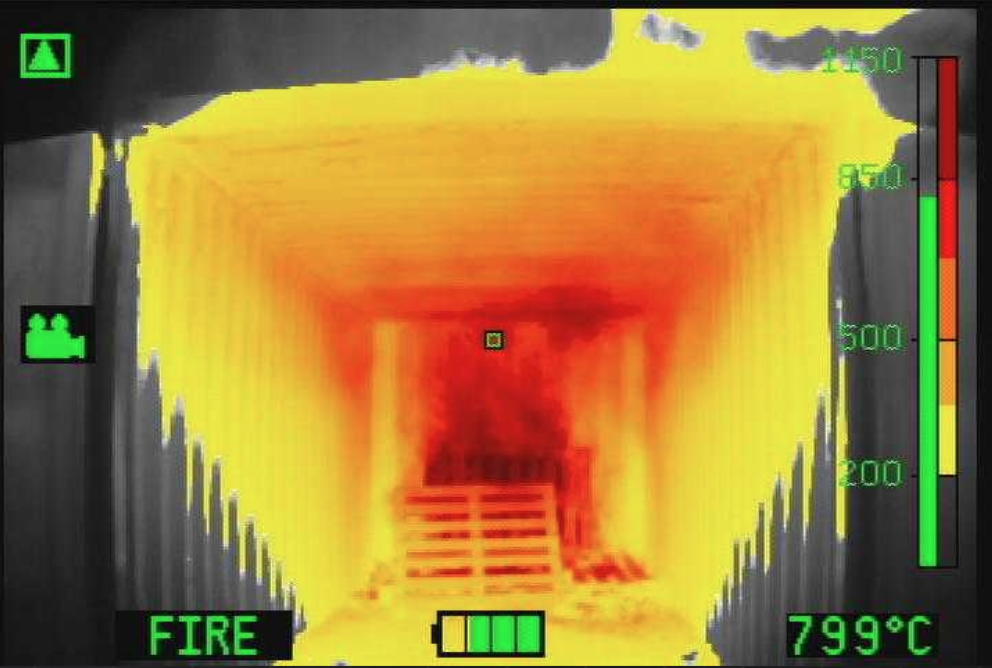
04. THERMAL DETECTION
A thermal override algorithm continuously monitors temperature data to detect high-heat anomalies. Once identified, it calculates the heat source’s position and overrides navigation controls, directing the robot to orient and move toward the fire source in real time.
05. DATA RELAY
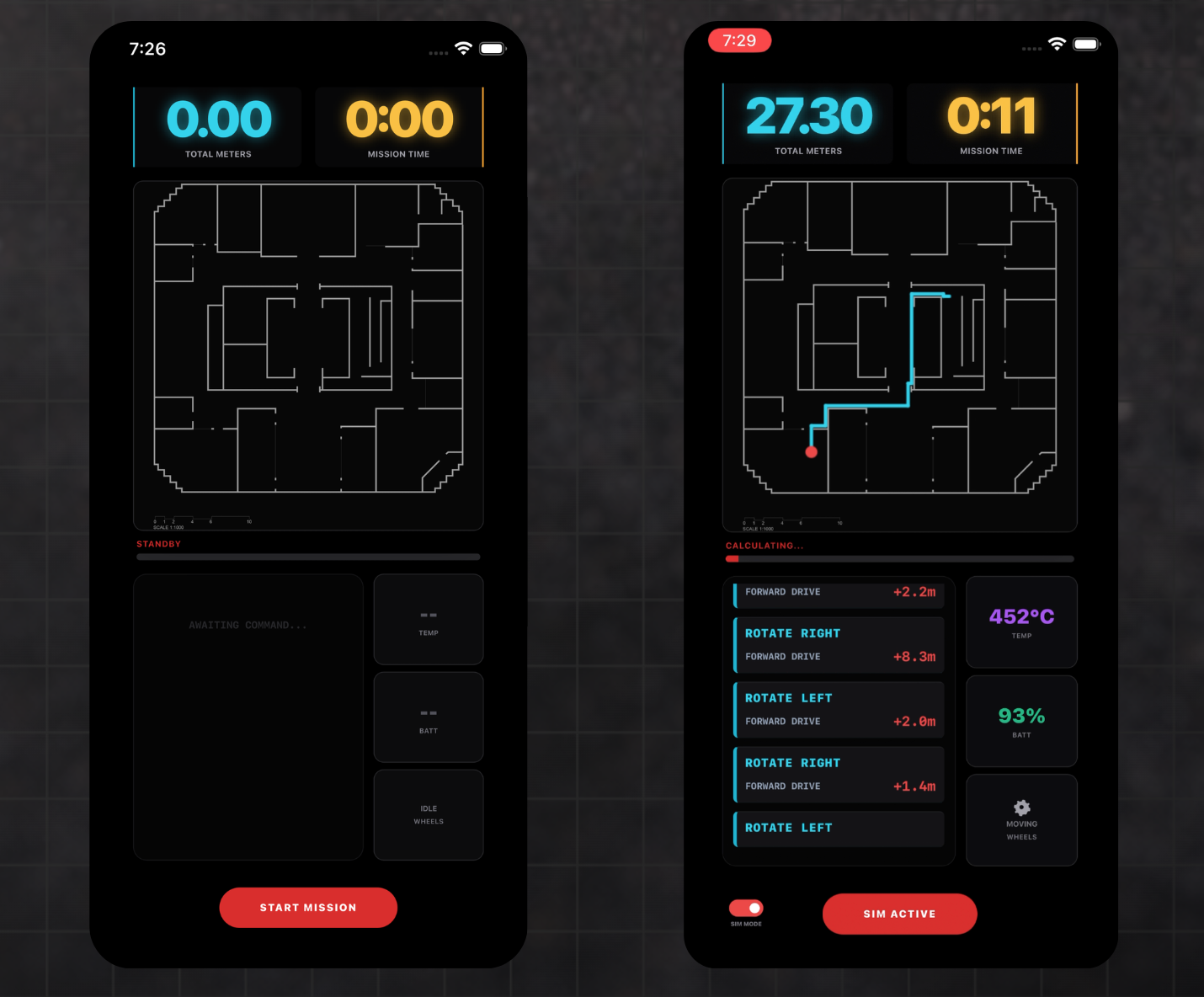
The interface is designed for high-stress environments, presenting critical information through three primary zones: key mission metrics, a real-time tactical map, and live telemetry with control functions.
Operators can plan and execute missions directly on the map by setting the robot’s position, orientation, and target location, enabling precise and intuitive navigation.

During operation, the system provides continuous situational awareness through live position tracking, breadcrumb trails, environmental monitoring, and clear visual alerts for safety-critical conditions such as temperature and battery levels.
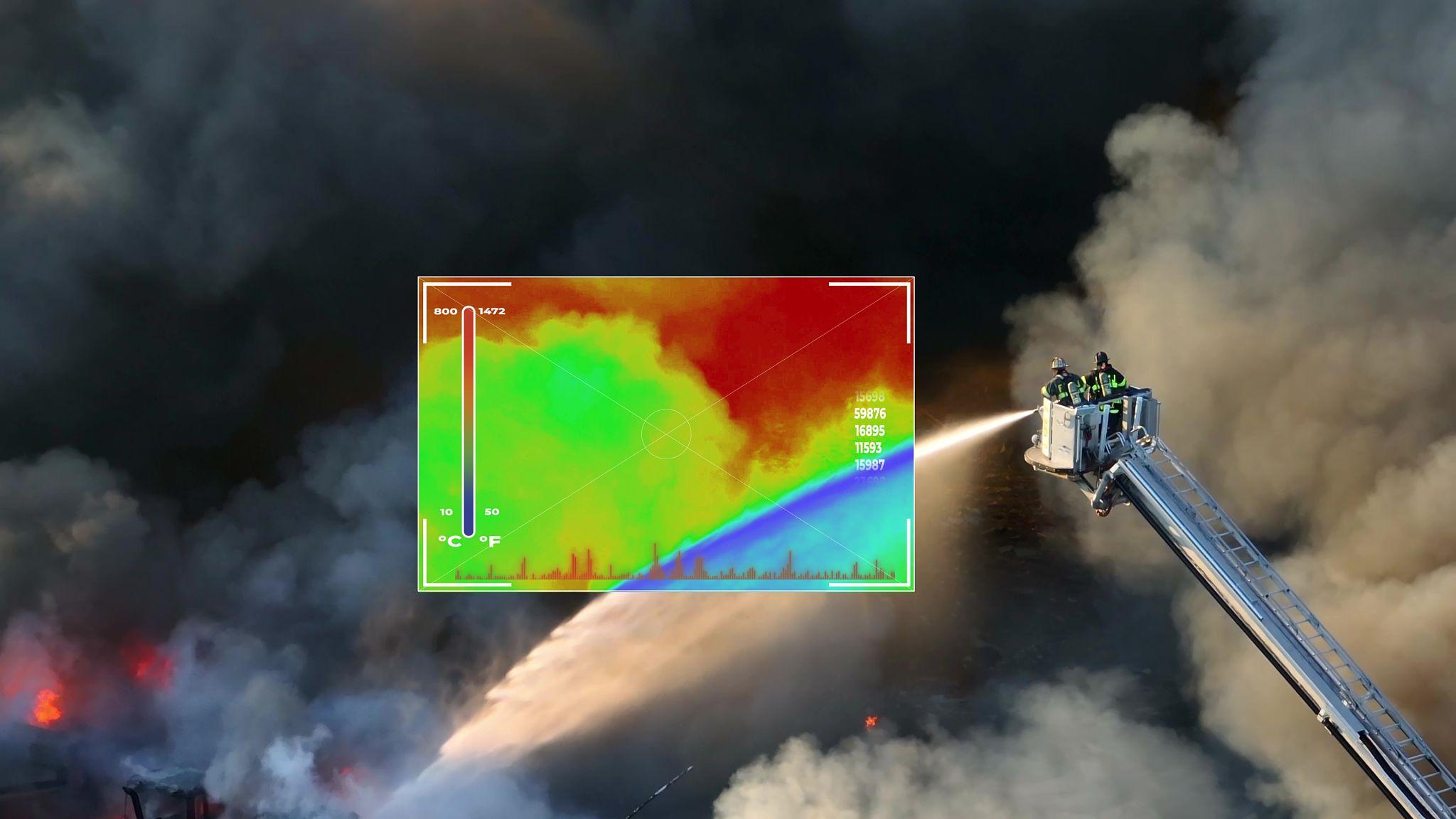
IMPACTS
SALAMANDER addresses a critical gap in fireground operations by reducing the need for blind entry in low-visibility environments. By autonomously assessing conditions ahead of firefighters, it provides real-time spatial and thermal information that enhances situational awareness and supports faster, more informed decision-making.
This shift from reactive to informed response improves operational efficiency while significantly reducing risk to frontline responders, enabling safer and more coordinated firefighting efforts.

FUTURE
While currently focused on fireground reconnaissance, SALAMANDER is designed as a scalable system that can extend to a wide range of emergency scenarios, including industrial fires, underground environments, and disaster response operations.
Future developments include multi-robot deployment, enhanced autonomy and mapping capabilities, and deeper integration with command systems through advanced interfaces and emerging technologies such as augmented reality. Together, these advancements position SALAMANDER as part of a next-generation ecosystem for intelligent emergency response.
This shift from reactive to informed response improves operational efficiency while significantly reducing risk to frontline responders, enabling safer and more coordinated firefighting efforts.

