The Novel Navi Knee System is an advanced navigation platform specifically developed to support High Tibial Osteotomy procedures, by enhancing surgical precision and reproducibility to enable accurate preoperative planning and intraoperative execution of this joint-preserving intervention.
Team members
Ernest Ong Kee Lin (ESD), Lim Wei Ping Dominic (EPD), Zhuang Yang Kun (ISTD), Karen Neo (ISTD), Haresh Jayant Mahalingam (ISTD), Siti Fatimah Binte Rosli (DAI)
Instructors:
Massimiliano Colla
Writing Instructors:
Susan Wong
Dominic Edmund Kim San Quah
Background
High Tibial Osteotomy
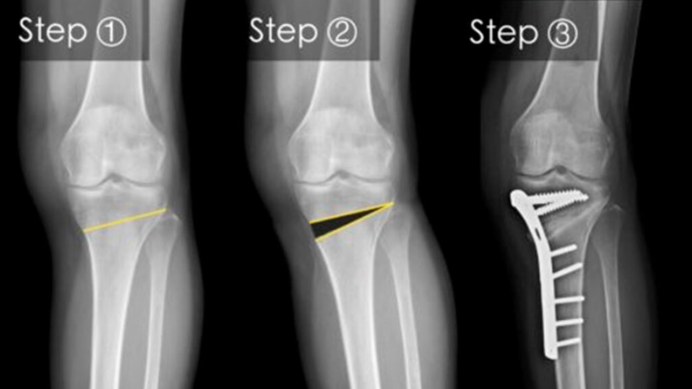
High tibial osteotomy (HTO) is a surgical procedure that corrects knee alignment by reshaping the upper tibia. It is commonly used for patients with one-sided knee osteoarthritis, where uneven load causes pain and joint damage. By realigning the leg, HTO redistributes weight to a healthier part of the knee, relieving pain, improving function, and slowing arthritis progression.
It is particularly valuable for younger or active patients, as it helps preserve the natural joint and delay the need for total knee replacement.
Challenges
HTO presents several challenges, particularly in achieving accurate planning and consistent surgical outcomes. The key limitations include:
Radiation Exposure: Multiple Computed Tomography (CT) scans may be required intraoperatively to monitor the surgical corrections, leading to higher cumulative radiation exposure for the patient and surgical staff.
Imaging Constraints: While CT imaging provides detailed anatomical data, it does not fully capture weight-bearing alignment, which is crucial for determining the correct mechanical axis correction.
Commercial Availability: Unlike total knee replacement, HTO does not have widely available and reliable commercial navigation systems.
Problem Statement
“How might we calculate the patient’s mechanical axis in a 3D space and assist in the precise realignment for HTO to improve surgical prediction and outcomes?”
Introducing the NNK System
Redefining prevision in high tibial osteotomy, the NNK system brings real time alignment guidance directly into the operating room. Empowering surgeons with intuitive insights, enabling smarter decisions and more consistent surgical outcome.
Designed for better outcomes.
Multiple functions in one system
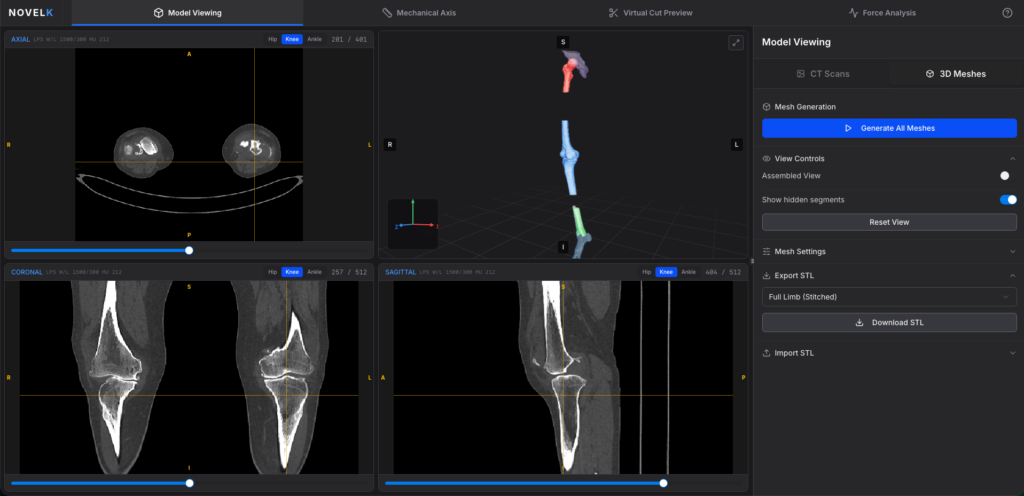
3D Anatomical Modelling
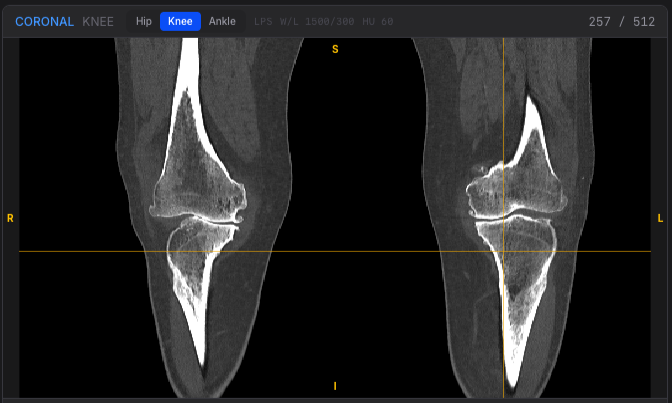
The system converts CT scan data into a precise, patient-specific 3D model of the hip, knee, and ankle, providing a comprehensive view of the entire lower limb. By reconstructing these key joints in a unified spatial model, surgeons can better understand overall alignment and anatomical relationships beyond what traditional 2D imaging offers.
This holistic 3D mapping enables more accurate pre-operative planning and supports intra-operative decision-making, ensuring that alignment corrections are based on the full mechanical context of the limb rather than isolated joint views.
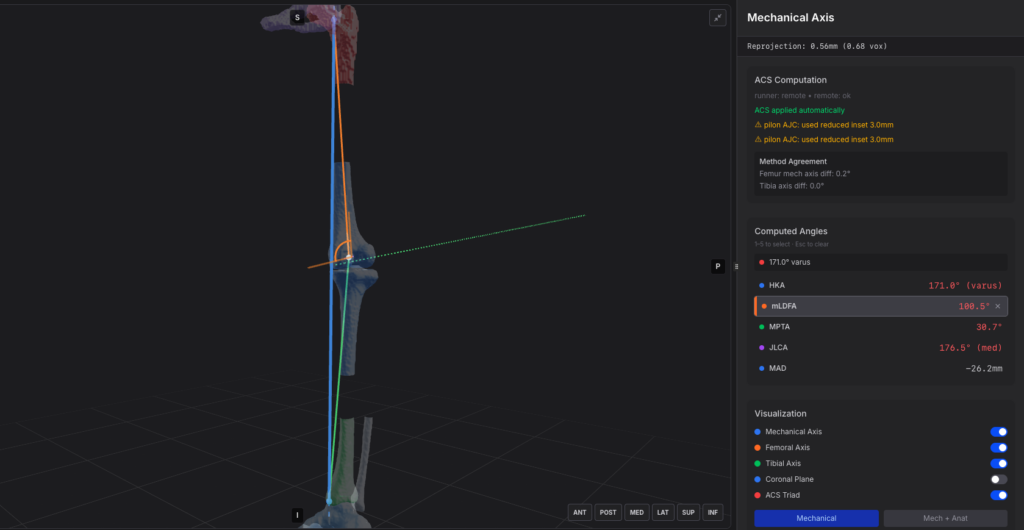
Mechanical Axis Computation
The system computes the pre-operative mechanical axis by identifying key anatomical landmarks from CT imaging data, ensuring an accurate baseline for surgical planning.
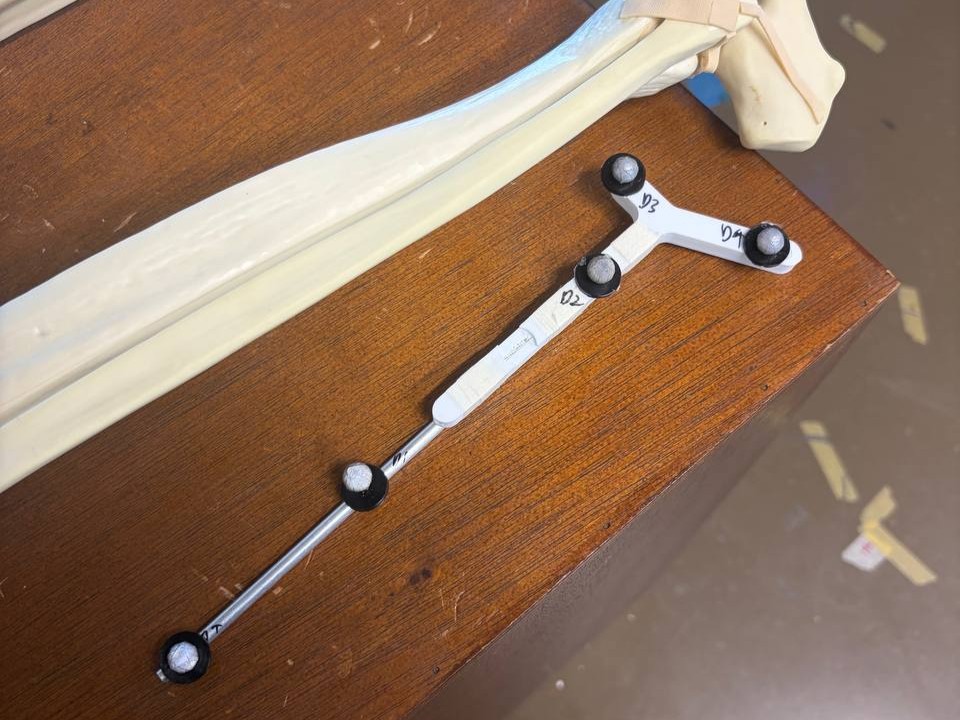
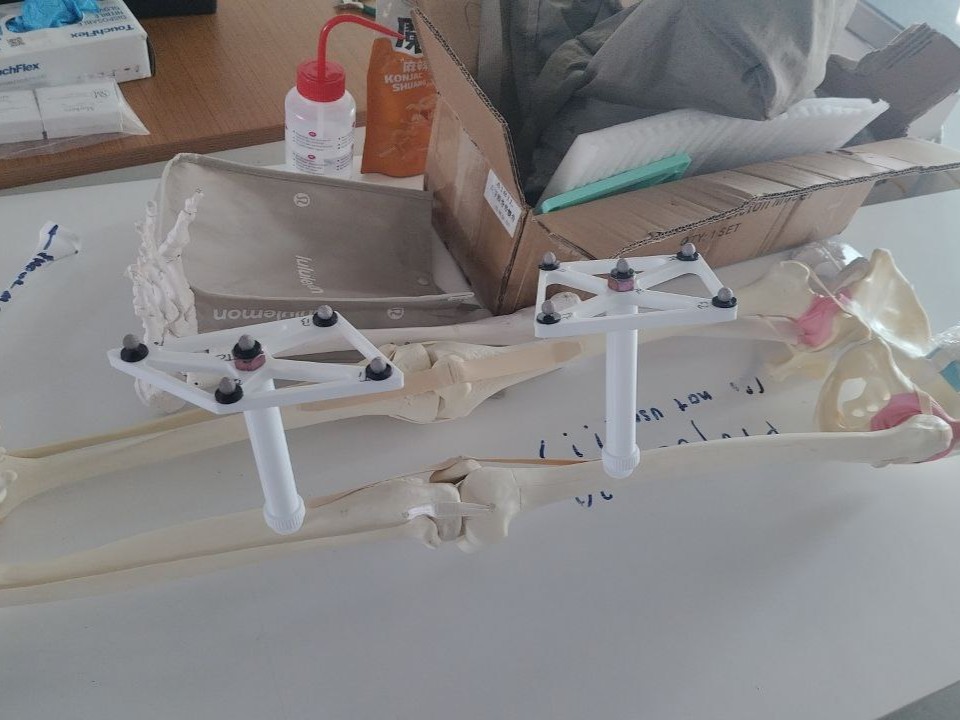
During surgery, motion capture technology dynamically tracks limb positioning to calculate the updated mechanical axis in real time, enabling precise adjustment and verification of alignment throughout the procedure.
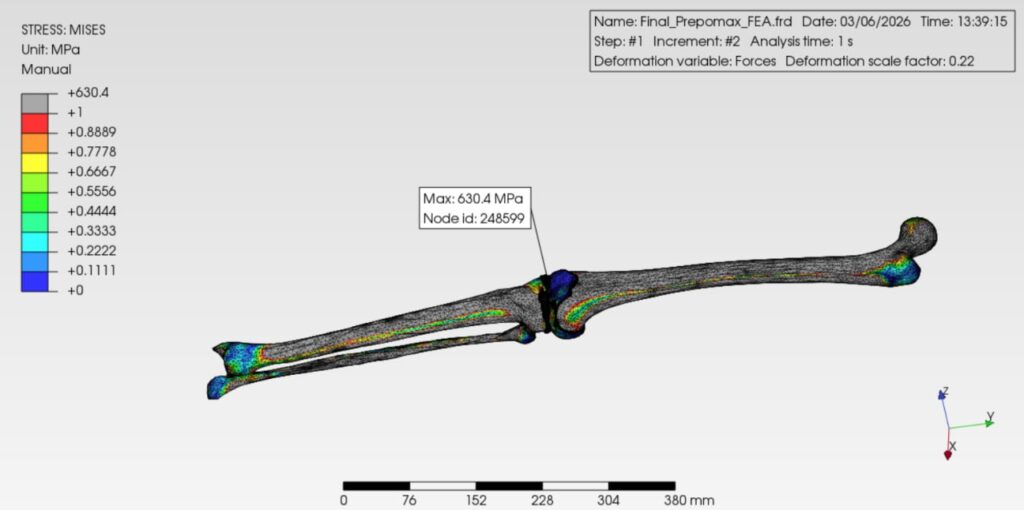
Finite Element Mapping
The system integrates finite element analysis to simulate load distribution across the knee joint based on the patient-specific 3D model and real-time alignment data. During surgery, this enables visualization of stress patterns within the joint, providing surgeons with quantitative insight into how corrections affect biomechanical loading.
By observing these stress changes intra-operatively, surgeons can refine alignment decisions to achieve more balanced load distribution, supporting improved joint function and long-term outcomes.
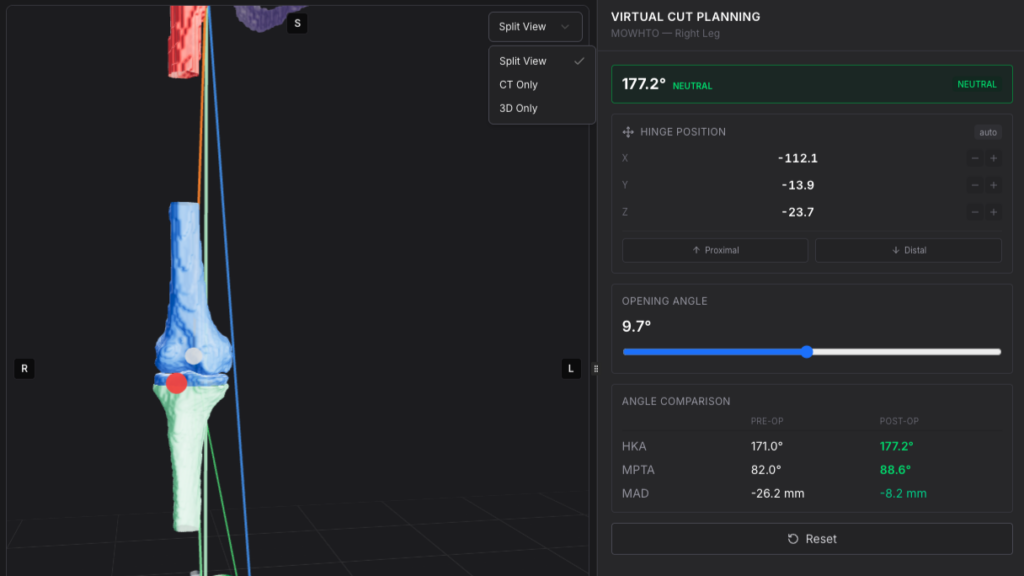
Virtual Cut Preview
The system enables surgeons to simulate osteotomy cuts directly on the patient-specific 3D model, allowing precise visualization of the planned correction before surgery. By adjusting the cut orientation and opening angle, users can immediately observe the resulting changes in limb alignment.
This interactive simulation provides real-time feedback on how each modification affects the mechanical axis, supporting accurate planning and helping ensure the intended correction is achieved intra-operatively.
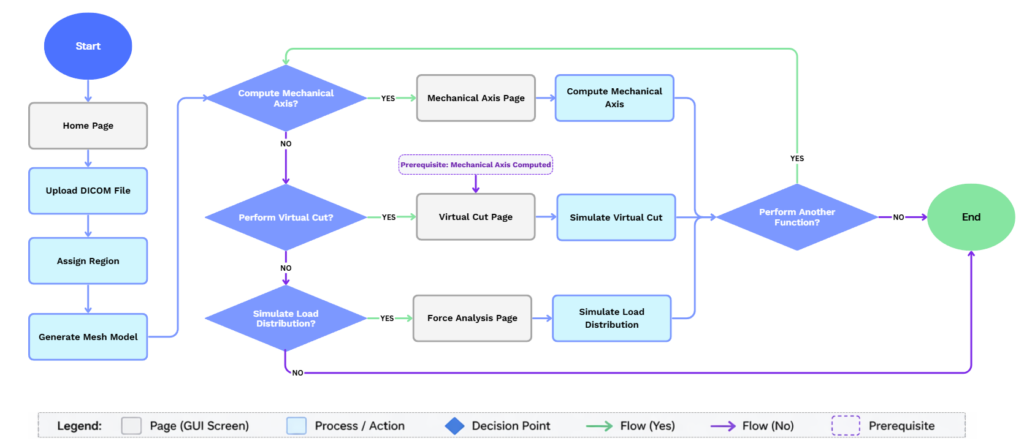
Smarter workflows for a better outcome
User Workflow
Acknowledgement
Team NNK would like to express our sincere gratitude to Singapore General Hospital for providing us with the opportunity to work on this project. We are especially appreciative to our mentors, Dr. Soong Jun Wei and Dr. Lau Jun Liang, for their unwavering support, insightful advice, and encouragement, all of which have been essential in determining the progress of this project.
The team would also like to convey our appreciation to our instructors: Professor Massimiliano, Dr Susan Wong & Mr Dominic Edmund Quah Kim San for their continuous support, constructive feedback, and academic guidance, all of which contributed to the successful progress of this project.
Special thanks to everyone who supported this project, in particular the team at the Robotics Innovation Laboratory for their technical assistance, resources, and guidance. Their expertise and collaboration have greatly contributed to the progress of this project and our learning.
At Singapore University of Technology and Design (SUTD), we believe that the power of design roots from the understanding of human experiences and needs, to create for innovation that enhances and transforms the way we live. This is why we develop a multi-disciplinary curriculum delivered v ia a hands-on, collaborative learning pedagogy and environment that concludes in a Capstone project.
The Capstone project is a collaboration between companies and senior-year students. Students of different majors come together to work in teams and contribute their technology and design expertise to solve real-world challenges faced by companies. The Capstone project will culminate with a design showcase, unveiling the innovative solutions from the graduating cohort.
The Capstone Design Showcase is held annually to celebrate the success of our graduating students and their enthralling multi-disciplinary projects they have developed.