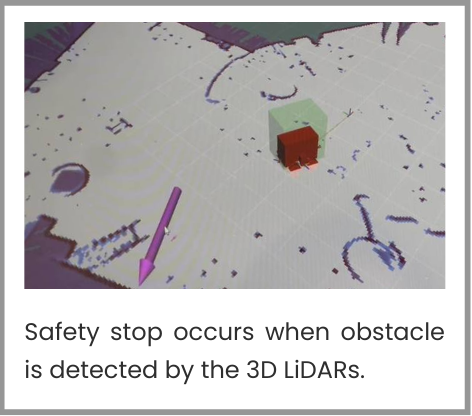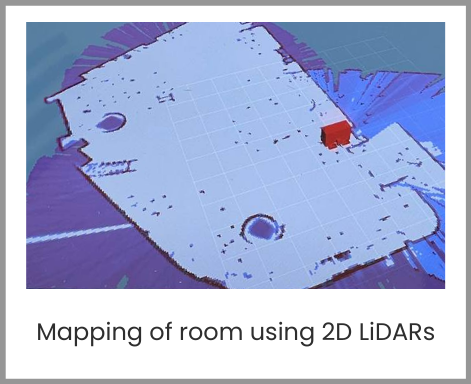
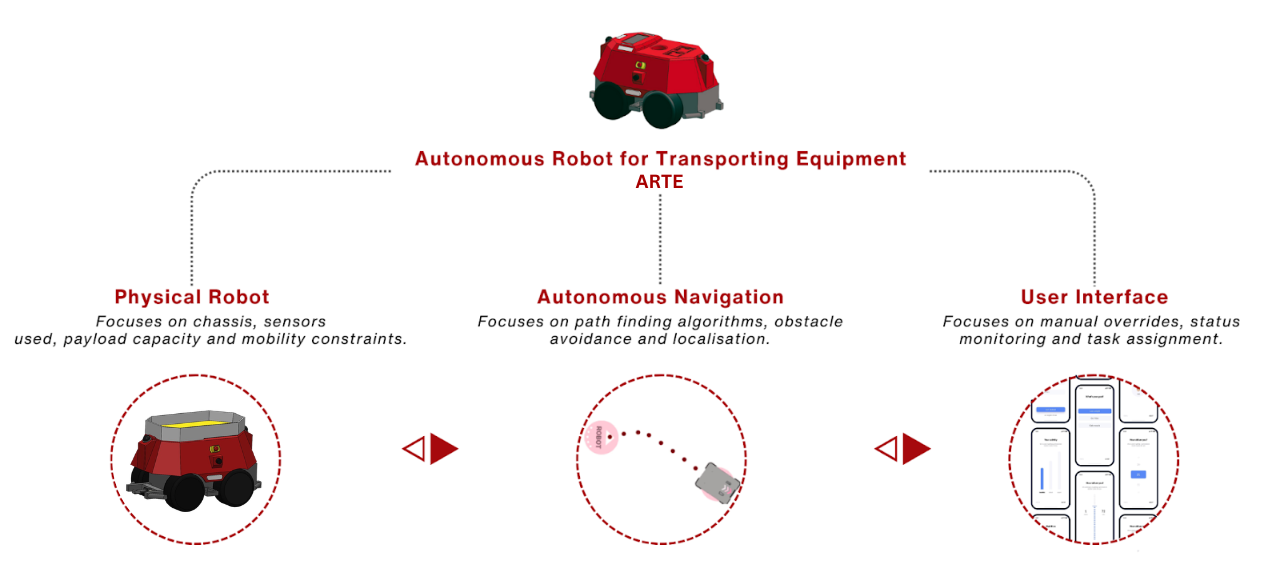











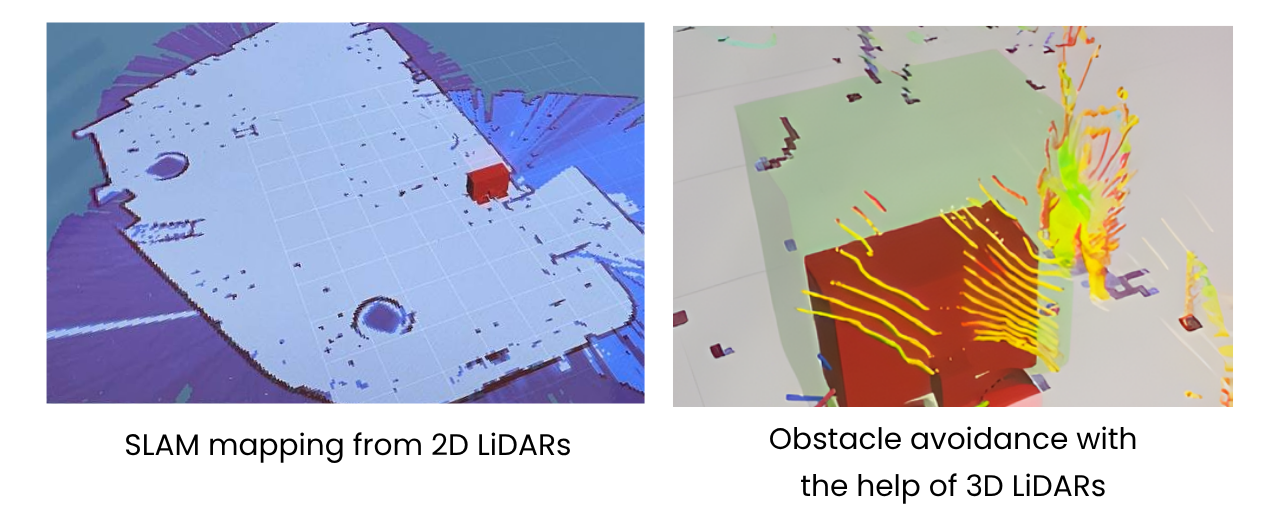
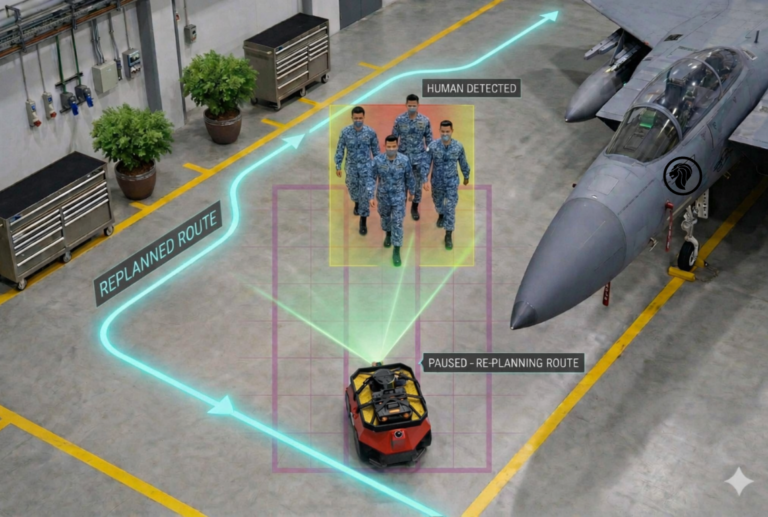
ARTE uses a combination of SLAM and LiDARs to continuously scan its surroundings, detecting humans and obstacles in real time.
When an object is identified within its path, the system immediately halts movement to prevent collisions. It then leverages onboard pathfinding algorithm (TEB) to compute an alternative route, ensuring safe, efficient, and uninterrupted navigation through dynamic environments.
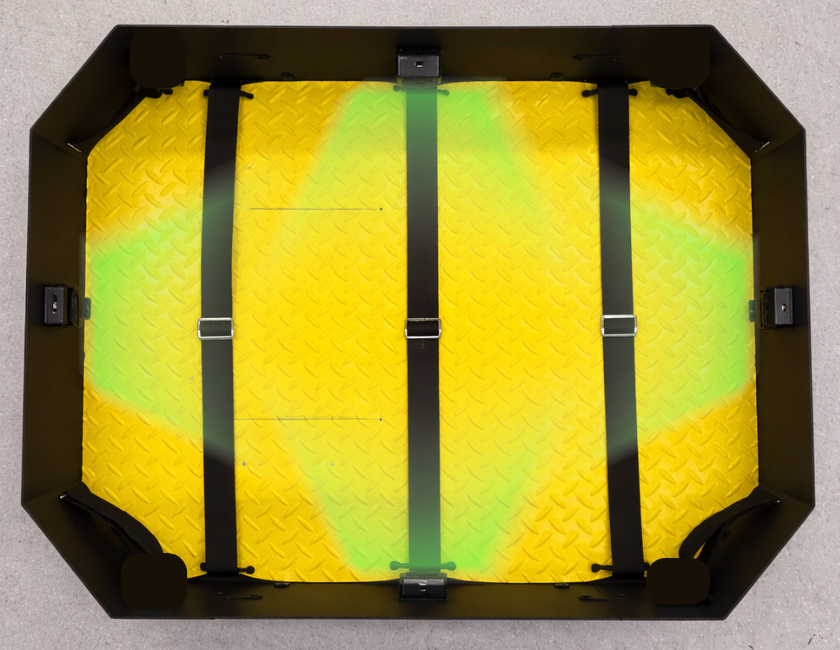
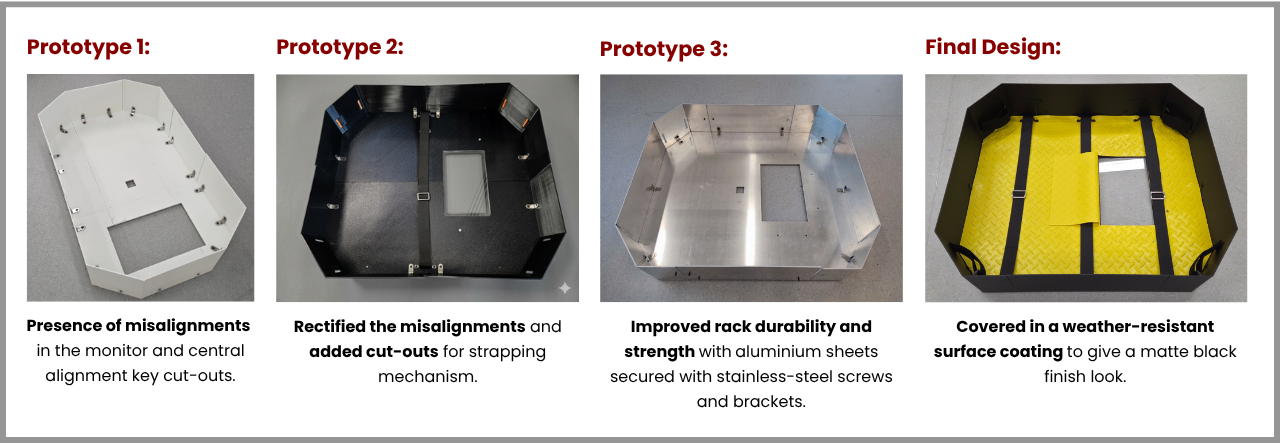
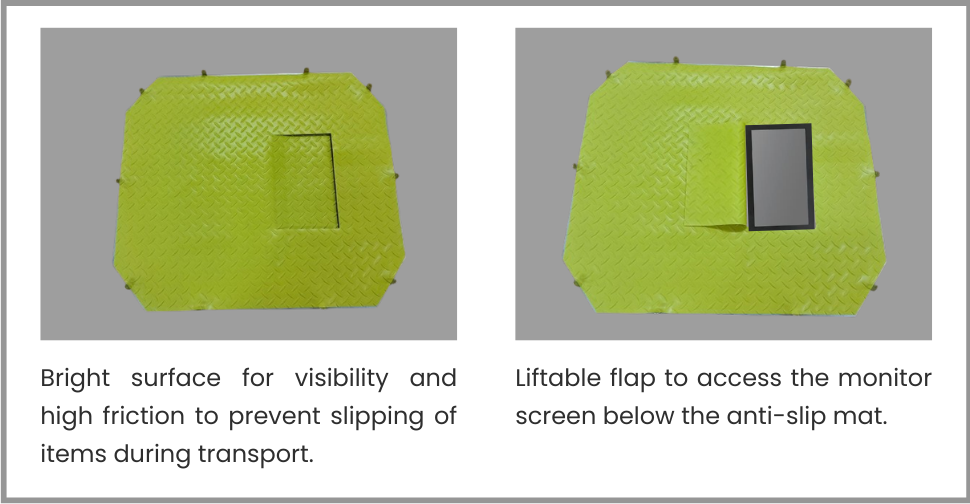
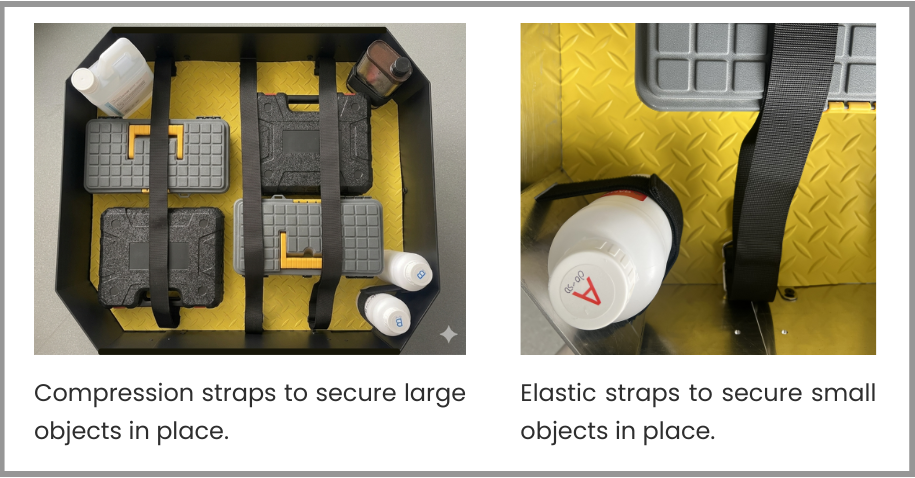
A payload monitoring system was developed to complement ARTE’s navigation system by checking that payload items remain present and in their expected positions during transport. This is important because lost items may become foreign object debris (FOD), creating safety risks in aviation environments.
By enabling the robot to detect and alert users to such anomalies, it enhances ARTE beyond a conventional logistics platform, improving safety, accountability, and operational reliability.