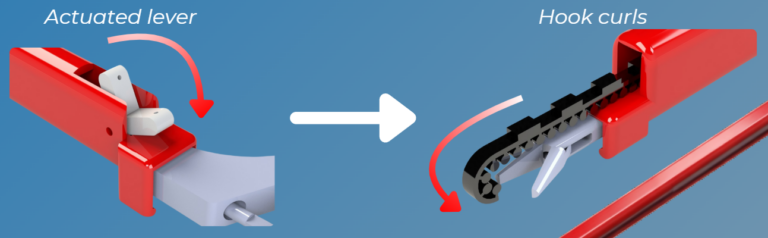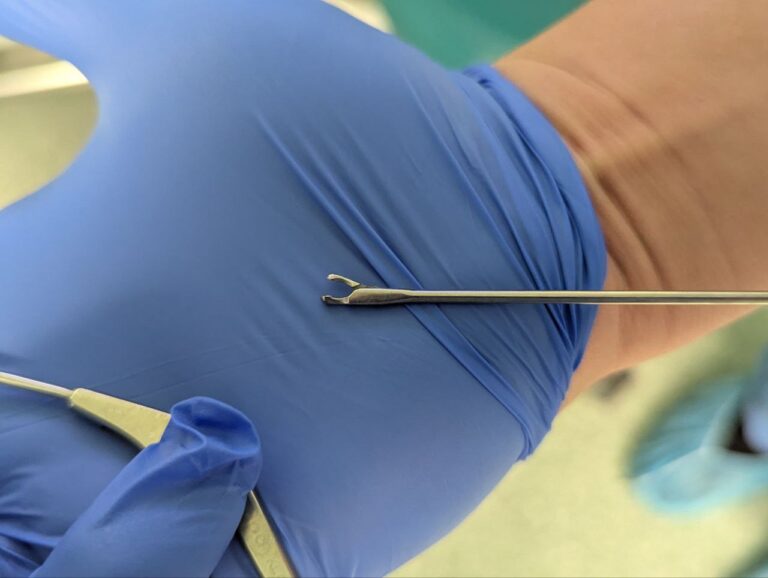
Switch ON
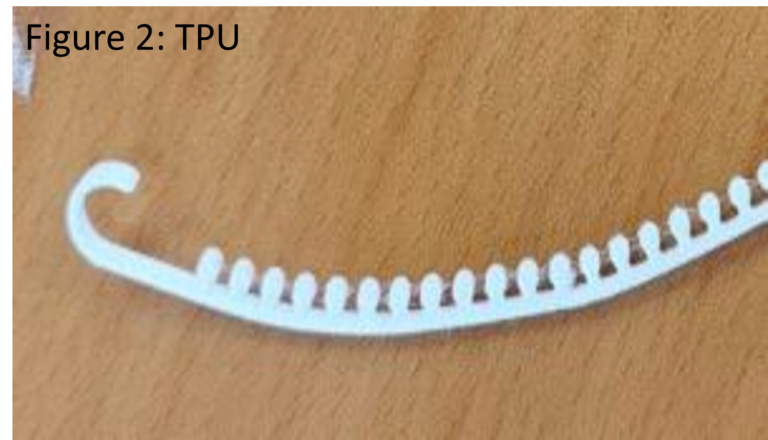
Hook Curls
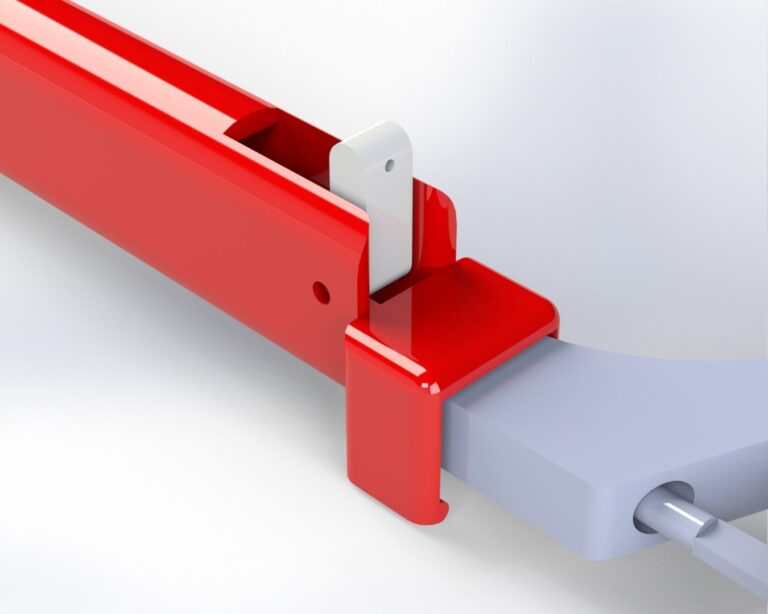
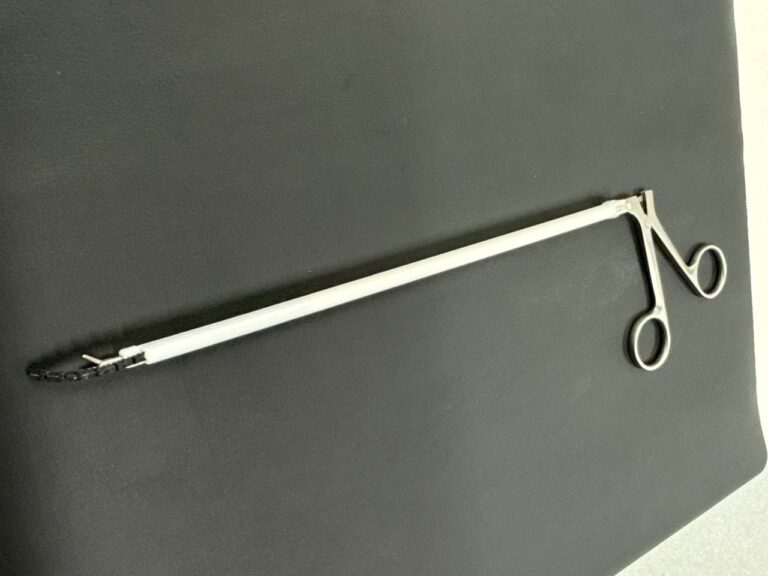
Switch
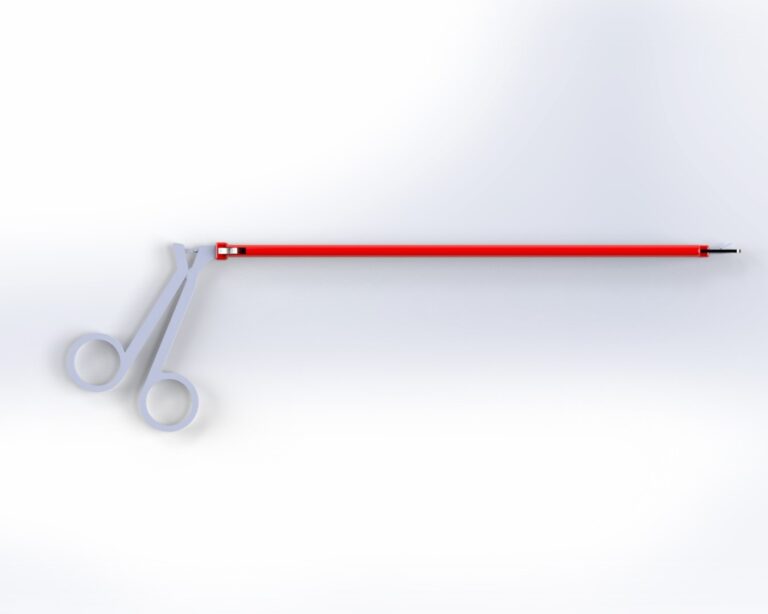
The switch on the side of MicroKiap allows for easy access to the actuation mechanism.
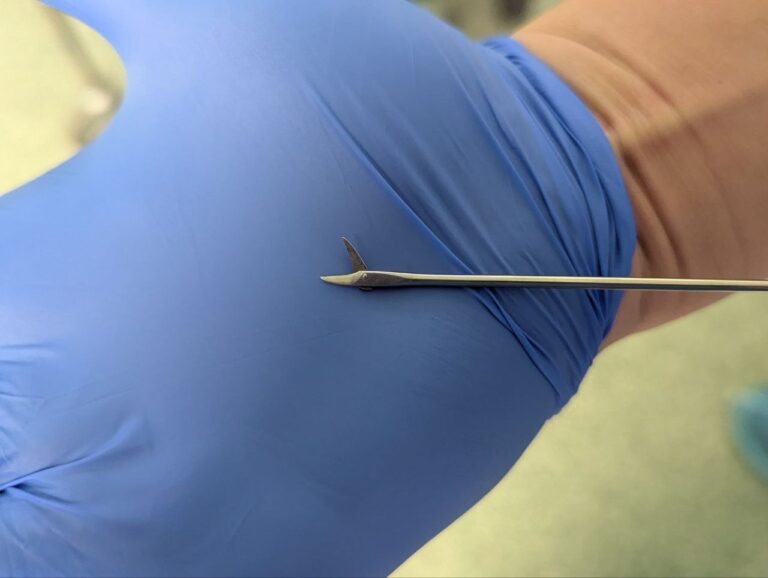
Switch OFF
Hook Relaxes
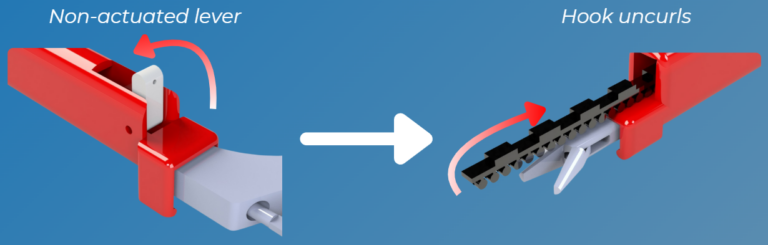
Thread
Two set of threads connected to the hook in the front and the switch at the back. Changing the state of the switch tensions one thread and relaxes the other allowing the hook to curl/uncurl.