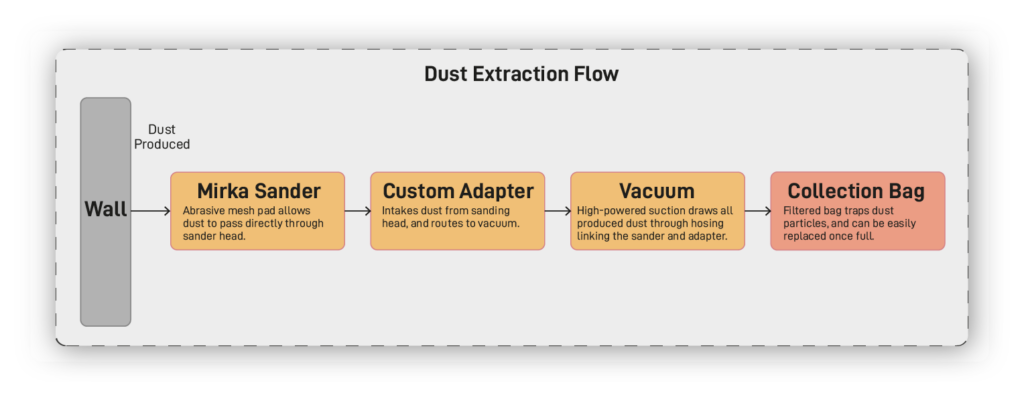


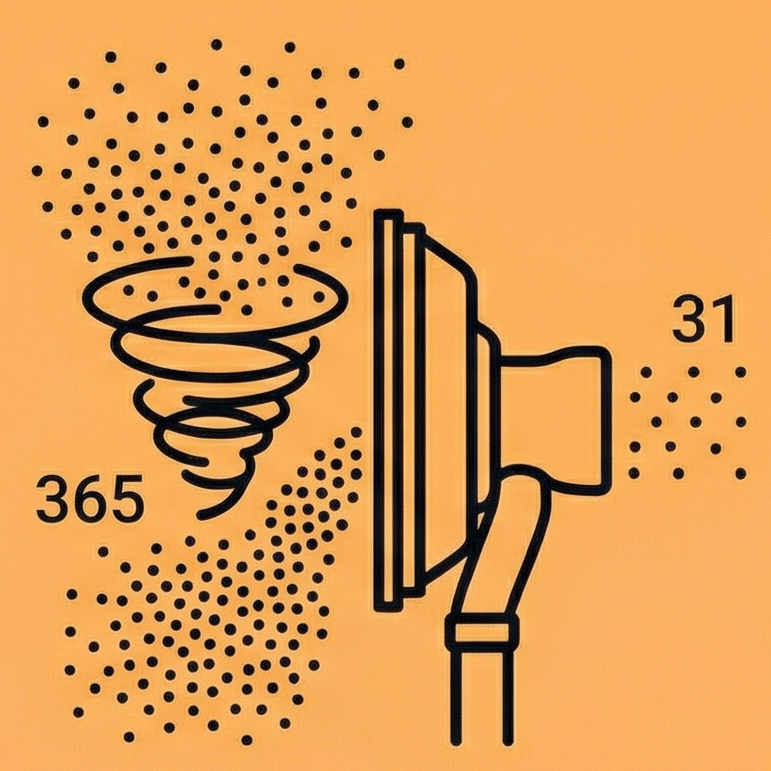


End Effector
A Mirka LEROS Orbital Sander is attached to the arm tube via a custom adapter, which also acts as a conduit for the vacuum unit to actively extract dust while sanding.
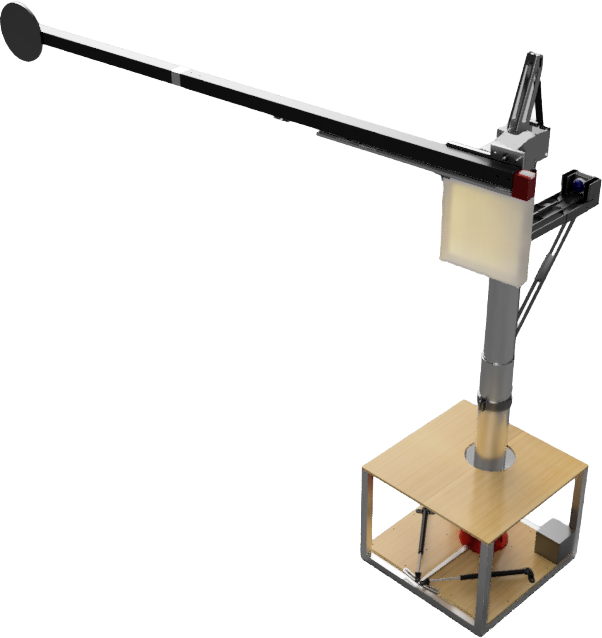
Arm Mechanism
Enables motion in both the pitch and yaw axes.
Utilises gas springs to provide passive compliance, ensuring that the sanding pad applies constant force against walls without the use of complex components.
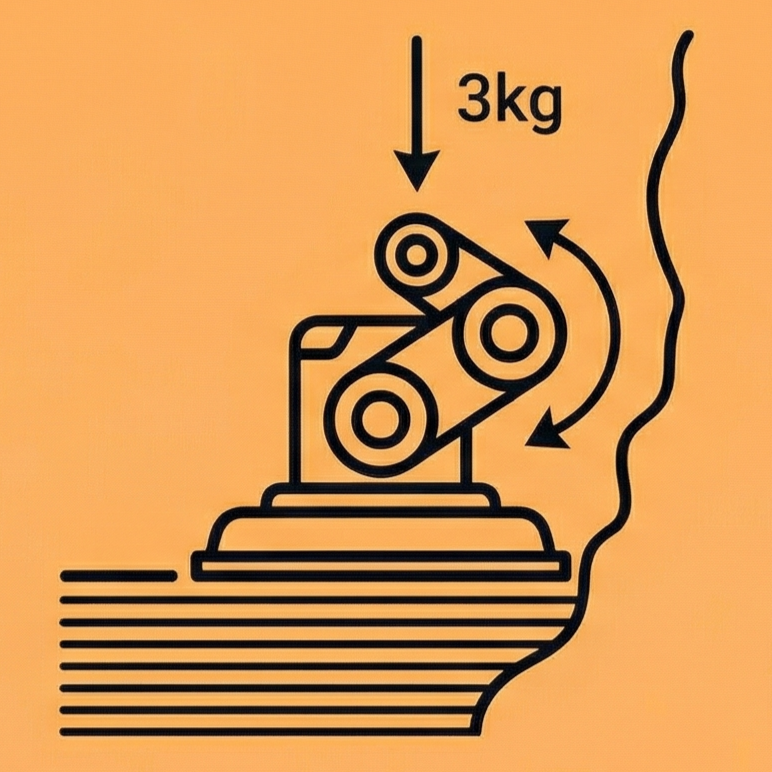
Counterweight + Particle Damper
Dual-purpose counterweight and particle damper.
Offsets arm payload to minimise motor torque, while internal interactions between particles dissipate vibrations from active sanding head.
Arm Tube
The main arm rotates and extends in broad, overlapping arcs. This allows the robot to efficiently sand large areas without needing to reposition its base.
Base
Acts as the system's foundation, lowering the center of gravity to prevent tipping during maximum arm extension.