Introducing Proj S18 – KLASS – Versatile Tentacle Arm
Tentickles aim to redefine the way soft robots are trained on specific tasks, by creating a methodology for building a digital twin that closely matches the real movement of a 2D planar soft robotic arm.
Soft robots are naturally safe and flexible — but that same flexibility makes them hard to predict and hard to control. Our work bridges that gap by creating a simulation model that can be tuned to behave like the real arm, so developers can test control strategies virtually before deploying them on hardware.
Team members
Jowell Nim (EPD), Wong Qi Yuan Kenneth (ESD), Darrel Liew Jian Hong (DAI), Wong Jun Ming Ivan (DAI), Clarence Lau Jun Wei (ISTD), Tan Aik Young (EPD), Fushia Noor Raakin Virtucio (ASD)
Instructors:
Wai Lee
Writing Instructors:
Belinda Seet
Dominic Edmund Kim San Quah
INTRODUCING TENTICKLES
Design Journey
1. Empathise
Soft robots offer immense potential because their flexible nature makes them safe, adaptable and capable of handling delicate objects . Unlike rigid industrial machines, their pliant materials allow them to safely operate around humans, conform to complex or unstructured environments, and gently grip fragile items without causing damage. This makes them highly desirable for delicate, real-world applications in fields ranging from medical procedures to search-and-rescue and agriculture.
2. Define
However, the very flexibility that makes soft robots so useful also makes them notoriously difficult to predict and control.
Because their structures constantly deform during motion, they have virtually infinite movement possibilities and suffer from low positional precision, rendering traditional rigid-robot control systems ineffective.
Furthermore, attempting to train advanced control systems through repeated real-world experiments is slow, expensive, and causes significant wear and tear on the physical hardware.
3.Solution
Tentickles bridges this gap by creating an accurate, cost-efficient digital twin of a 2D planar soft robotic arm. Using a six-step methodology that combines overhead camera tracking with MuJoCo simulation, developers can perfectly align the physical and virtual arms by tuning parameters like stiffness, damping, and friction. This parallel simulation environment unlocks the ability to safely run thousands of tests and train advanced, learning-based control models (like reinforcement learning) at an accelerated pace before deploying them to the physical robot.
Accelerating Soft Robotics Development
Faster Training
A digital twin allows thousands of simulations to run in parallel, enabling much faster testing and training compared to repeated real-world experiments.
Reduced Cost
Most experiments can be done in simulation, reducing wear and tear on the physical robot while lowering maintenance costs and downtime
Enabling Learning-Based Control
The virtual environment provides a safe space to train advanced control methods, such as reinforcement learning, before applying them to the real robot.
Why Soft Robotics?
Safe
Soft robots are made from flexible materials that deform on contact. This reduces the risk of injury or damage, making them safer to operate around people compared to rigid industrial robots.
Adaptive
Their flexible structure allows soft robots to bend, stretch, and conform to objects. This makes them well suited for unstructured or delicate environments such as medical procedures, agriculture, and search-and-rescue tasks.
Delicate Handling
Soft robotic grippers can grasp fragile or irregularly shaped objects without damaging them. This makes them useful for tasks like handling food, biological samples, or sensitive materials.
However…
Challenges of Soft Robotics
Infinite Movement Possibilities
Soft robots can bend and deform in many different ways. This creates a large number of possible movement patterns, making their behaviour difficult to predict and analyse.
Low Positional Precision
Because the robot’s structure continuously deforms during motion, achieving accurate and repeatable positioning is challenging. This makes tasks that require high precision harder to perform.
Complex Control Systems
Controlling soft robots requires more advanced sensing and control methods since their shape changes constantly during operation. Traditional rigid-robot control approaches often do not work well.
Therefore...
Our project focuses on developing a training methodology for a digital twin that closely mirrors the movements of a physical soft robotic arm. Once the digital twin accurately replicates the arm’s behaviour, it can be used to train the physical arm on more complex tasks — such as manipulating objects of varying shapes and sizes. This opens the door to new applications in robotics, addressing one of the core challenges that soft robotics faces today.
Cad Model
Training Methodology
Step 1: Set Up Physical Tracking
Optitrack markers used to track position of each segment of the tentacle arm
Step 2: Simulate the model's physics in mujoco
A digital version of the soft robotic arm is built in MuJoCo to replicate the structure and movement of the physical system.
Step 3: Data Collection
Data is collected from the mujoco simulation and physical simulation with the same motor input sequence
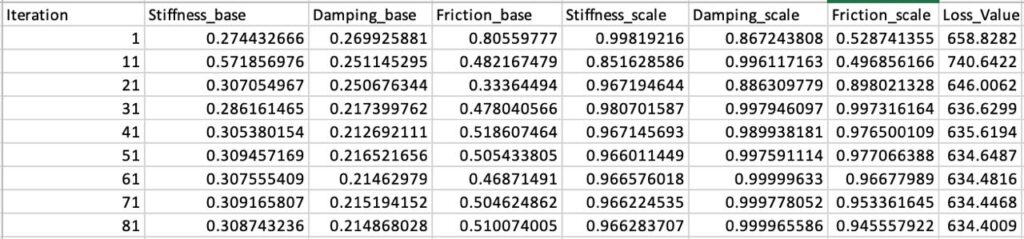
Step 4: Parameter Tuning (System Identification)
The simulation parameters such as stiffness, damping and friction are adjusted after each run using CMA-ES (Covariance Matrix Adaptation Evolution Strategy) algorithm, so that the virtual model’s movement resembles the movement of the physical arm
Reinforcement learning
With a sufficiently accurate digital twin established after system identification, we moved to reinforcement learning (RL) to develop autonomous control policies. As a proof of concept focusing on Phase 1, we used the Soft Actor-Critic (SAC) algorithm, selected for its superior sample efficiency and stability, to train the arm on a tip-to-target point reaching task. The training successfully achieved a stable 80–90% success rate for this task.
Future Work
First, purpose-driven training sequences featuring asymmetric activations and force ramps will be generated to better model simultaneous bidirectional motions and account for residual motor resistance.
Second, the system will be extended from a 2D planar workspace to a 3D spatial environment by adopting a three-cable SpiRob configuration, enabling omnidirectional bending and more complex manipulation.
Third, transferability testing will be conducted on alternative soft robot morphologies, such as pneumatic or fiber-reinforced actuators, to validate the methodology’s general-purpose applicability.
At Singapore University of Technology and Design (SUTD), we believe that the power of design roots from the understanding of human experiences and needs, to create for innovation that enhances and transforms the way we live. This is why we develop a multi-disciplinary curriculum delivered v ia a hands-on, collaborative learning pedagogy and environment that concludes in a Capstone project.
The Capstone project is a collaboration between companies and senior-year students. Students of different majors come together to work in teams and contribute their technology and design expertise to solve real-world challenges faced by companies. The Capstone project will culminate with a design showcase, unveiling the innovative solutions from the graduating cohort.
The Capstone Design Showcase is held annually to celebrate the success of our graduating students and their enthralling multi-disciplinary projects they have developed.