Versatile robotic system to support precise object handling and documentation
Introducing Project S18 – HTX Adaptive Gripper
GRIP-X is an AI-powered robotic sorting and labelling solution that revolutionises high-mix and low-volume documentation — demonstrating the seamless integration of robotics and AI in the digitisation of physical collections.
Team members
Looi Chi Han (EPD), Tan Hiang Khai Joshua (EPD), Ng Sue Chi (ESD), Isaac Tay Eng Hian (CSD), RK Suriya Varshan (EPD), Chai Yu Cheng, Raynard (ESD), Lim Cheng Ee (CSD)
Instructors:
Bradley Adam Camburn
Writing Instructors:
Rashmi Kumar
Dominic Quah
The Home Team Science and Technology Agency (HTX), a statutory board under Singapore’s Ministry of Home Affairs, drives cutting-edge science and technology to bolster national security.
Within HTX, the Robotics, Automation, and Unmanned Systems (RAUS) Centre of Expertise develops robotic solutions that boost operational efficiency and decision-making.
What is the current problem?
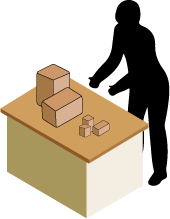
1. Manually pick out items and arrange them neatly on a table
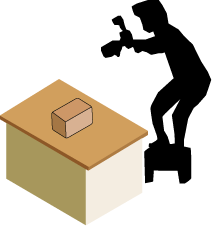
Climb a step ladder to capture a top-down photo of each item
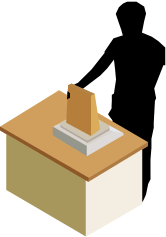
Transfer the photos, then manually pair them with item descriptions and dimensions
Weigh each item and carefully transfer it into a bag before sealing
Over time, this not only slows downproductivity but also contributes to fatigue and potential injury.
Our goal is to deeply understand and address these pain points — reducing risk, improving efficiency, and designing a system that supports the user rather than working against them.
How might we streamline the object handling and sorting process — reducing time and labour by 90%?
Categorising items by size into two distinct groups
Recording key attributes of each item, such as dimensions and visual references
Here's where Grip-X comes in
The process istedious and repetitiveeasy.
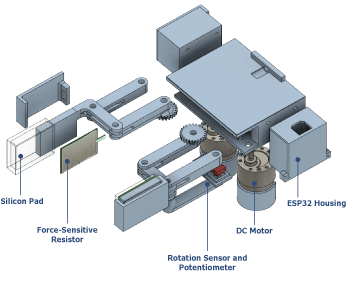
Adaptive Gripper
Reverse Double Four Bar gripper to reliably grip objects of up to 1.75kg, due to high torque offered by a DC motor.
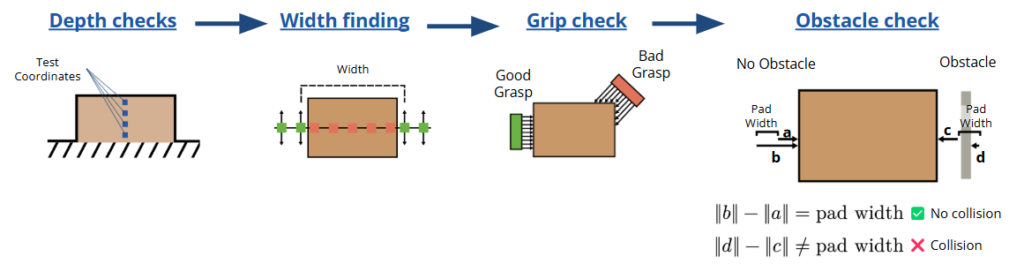
Precise handling of objects is enabled by a position control loop, opening the gripper jaw to a specific width before proceeding to pick up an object, thereby reducing the vertical deviation when the bar linkages rotate. After which, a pressure control mode ensures sufficient force when gripping the object, reducing incidences of slippage.
Grasping Algorithm
A novel algorithm was designed to circumvent the limitations of a single depth camera to generate grasp targets, even for cluttered scenes.
A height-displaced triangle mesh is generated, which valid grasps are generated against.
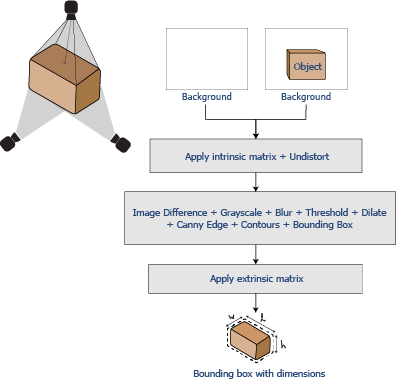
Size Estimation
With our triangulated camera setup (top + dual front angles), the booth can approximate object sizes through reconciling intrinsic and extrinsic matrices. The intrinsic matrix encodes the camera’s internal parameters, while the extrinsic matrix defines its position and orientation. Together, they map 3D world points to 2D image coordinates, enabling size estimation from images.
AI Labelling
The multi-angle collage is then fed through AI-powered object recognition using OpenAI’s vision model. By customising a prompt to output unstructured descriptions, a rich description can be recorded in the database.
Combined together, the process becomes
90% faster
more detailed
infinitely simpler
At Singapore University of Technology and Design (SUTD), we believe that the power of design roots from the understanding of human experiences and needs, to create for innovation that enhances and transforms the way we live. This is why we develop a multi-disciplinary curriculum delivered v ia a hands-on, collaborative learning pedagogy and environment that concludes in a Capstone project.
The Capstone project is a collaboration between companies and senior-year students. Students of different majors come together to work in teams and contribute their technology and design expertise to solve real-world challenges faced by companies. The Capstone project will culminate with a design showcase, unveiling the innovative solutions from the graduating cohort.
The Capstone Design Showcase is held annually to celebrate the success of our graduating students and their enthralling multi-disciplinary projects they have developed.