X
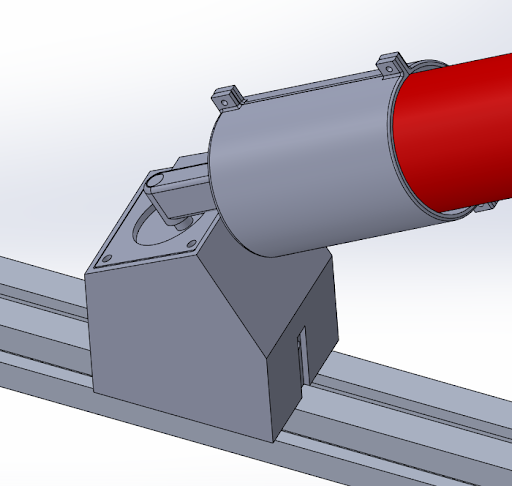 Simulate realistic combat interactions while ensuring user safety. The mount is made of carbon fibre reinforced PETG plastic as it is heat resistant. Furthermore, the motor holder is at a 45-degree angle to simulate a downward strike.
Simulate realistic combat interactions while ensuring user safety. The mount is made of carbon fibre reinforced PETG plastic as it is heat resistant. Furthermore, the motor holder is at a 45-degree angle to simulate a downward strike.
X
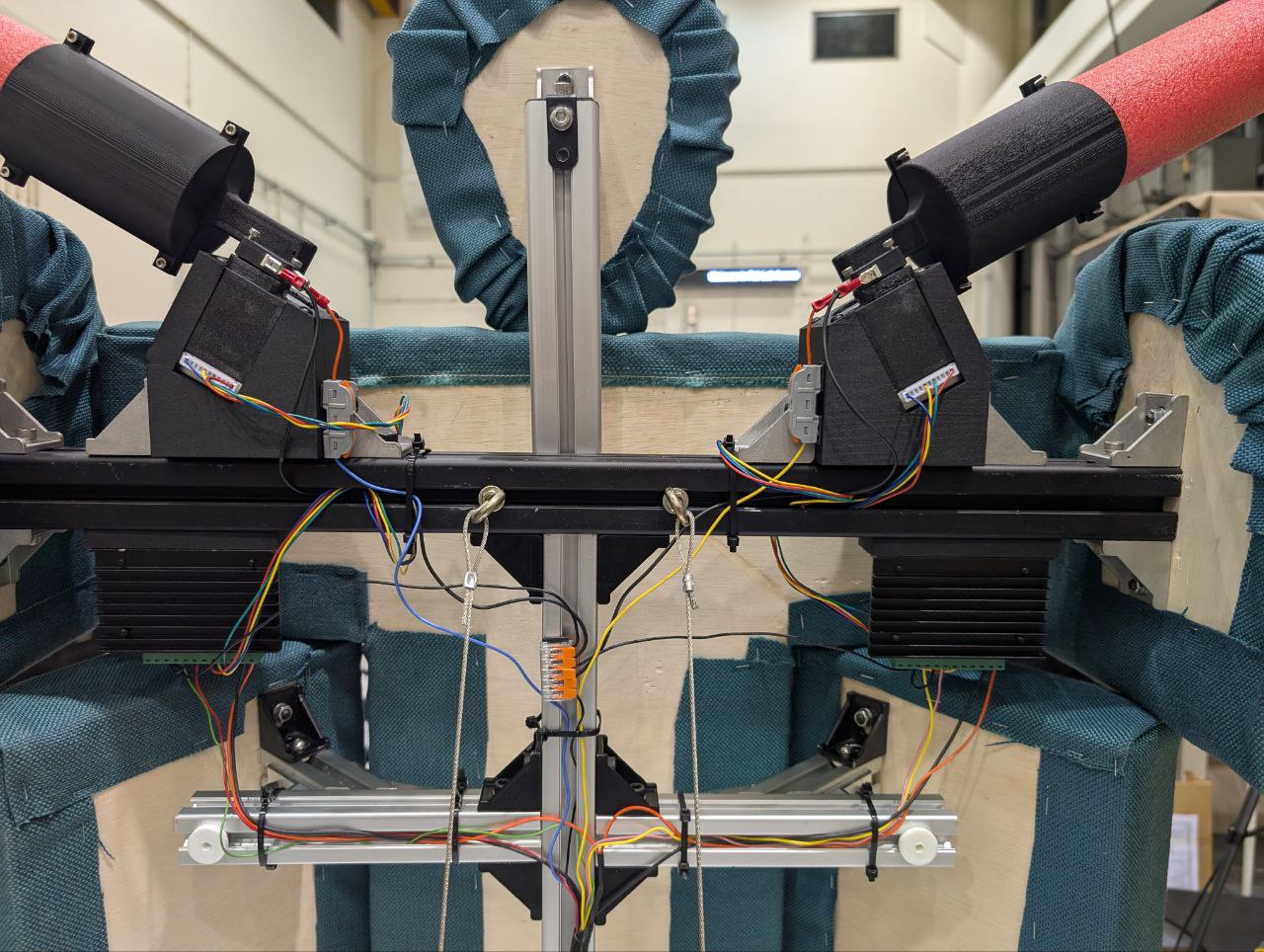 The motors are mounted onto the aluminium extrusion using a 90-degree aluminium bracket to hold it in place. The drivers are also mounted to the back to minimise noise through the wires.
The motors are mounted onto the aluminium extrusion using a 90-degree aluminium bracket to hold it in place. The drivers are also mounted to the back to minimise noise through the wires.X
 Through rigours testing it was found that a sandwich of PU, EVA, and PU was the best combination for durability and sturdiness without injury when using hands to attack. A wood backing was added to allow for mounting.
Through rigours testing it was found that a sandwich of PU, EVA, and PU was the best combination for durability and sturdiness without injury when using hands to attack. A wood backing was added to allow for mounting.
X
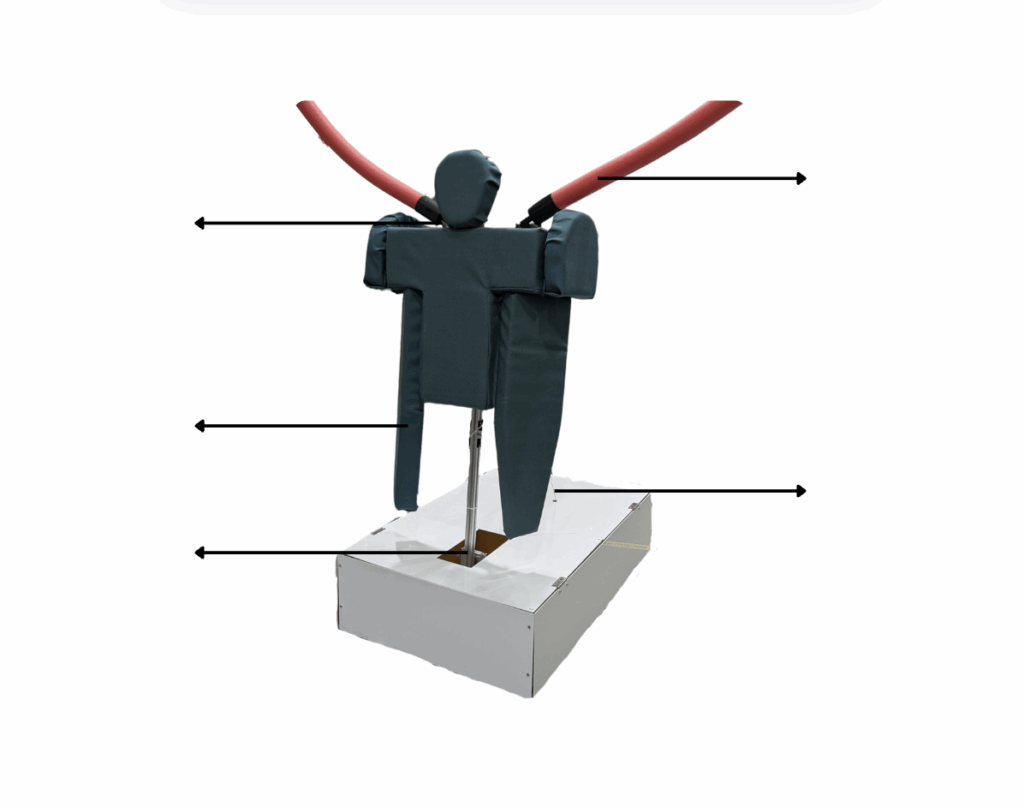
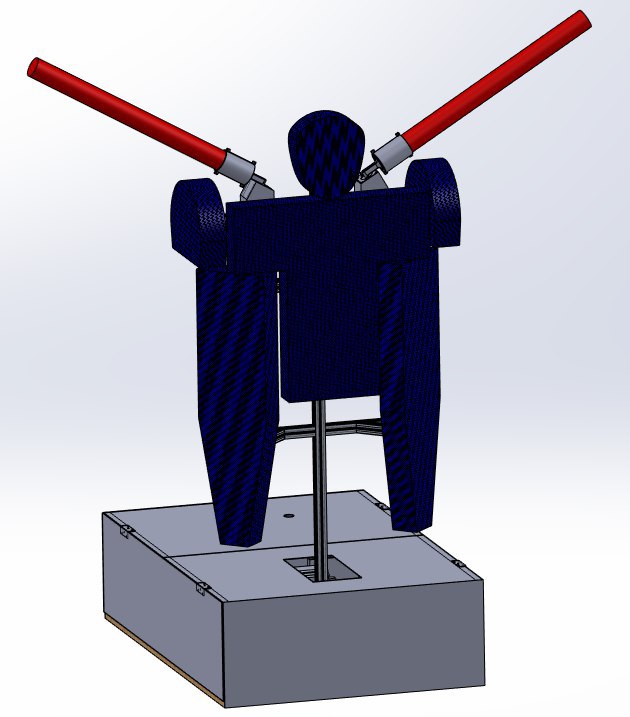
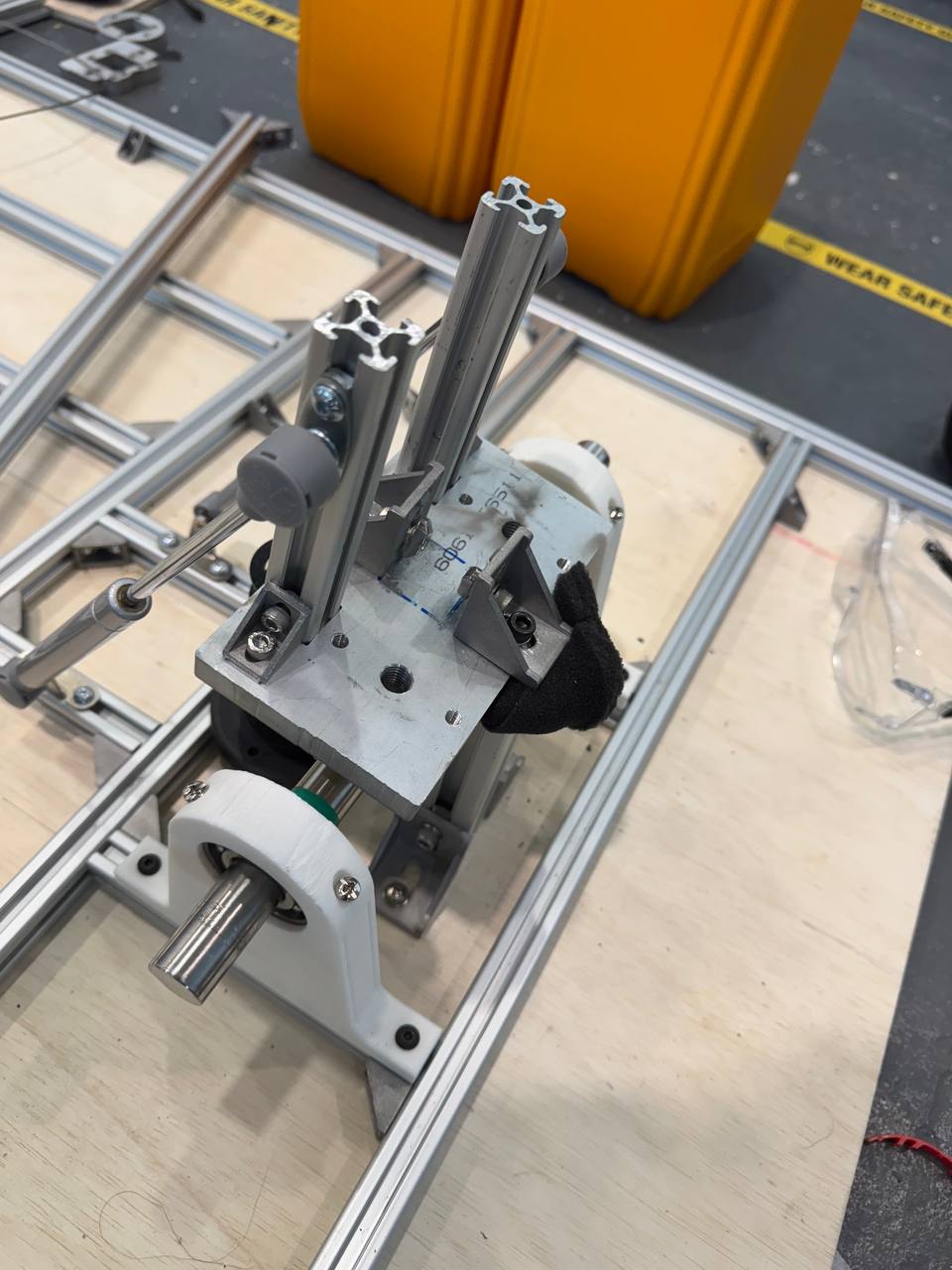 The base allows for restoration after retaliation by the manikin via two gas cylinders on either side with a spring at the rear which acts as a soft end stop.
Note: The image above was taken without the manikin attached.
The base allows for restoration after retaliation by the manikin via two gas cylinders on either side with a spring at the rear which acts as a soft end stop.
Note: The image above was taken without the manikin attached.
Popup Title
X
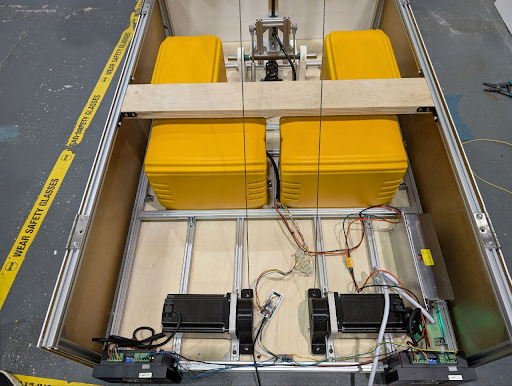 The pulley system is powered by two motors at the rear end of the base. Both cables are tensioned allowing the manikin to stand up right. When the motors run it further spools the cable to simulate a dodge.
The pulley system is powered by two motors at the rear end of the base. Both cables are tensioned allowing the manikin to stand up right. When the motors run it further spools the cable to simulate a dodge.
Initial Concepts
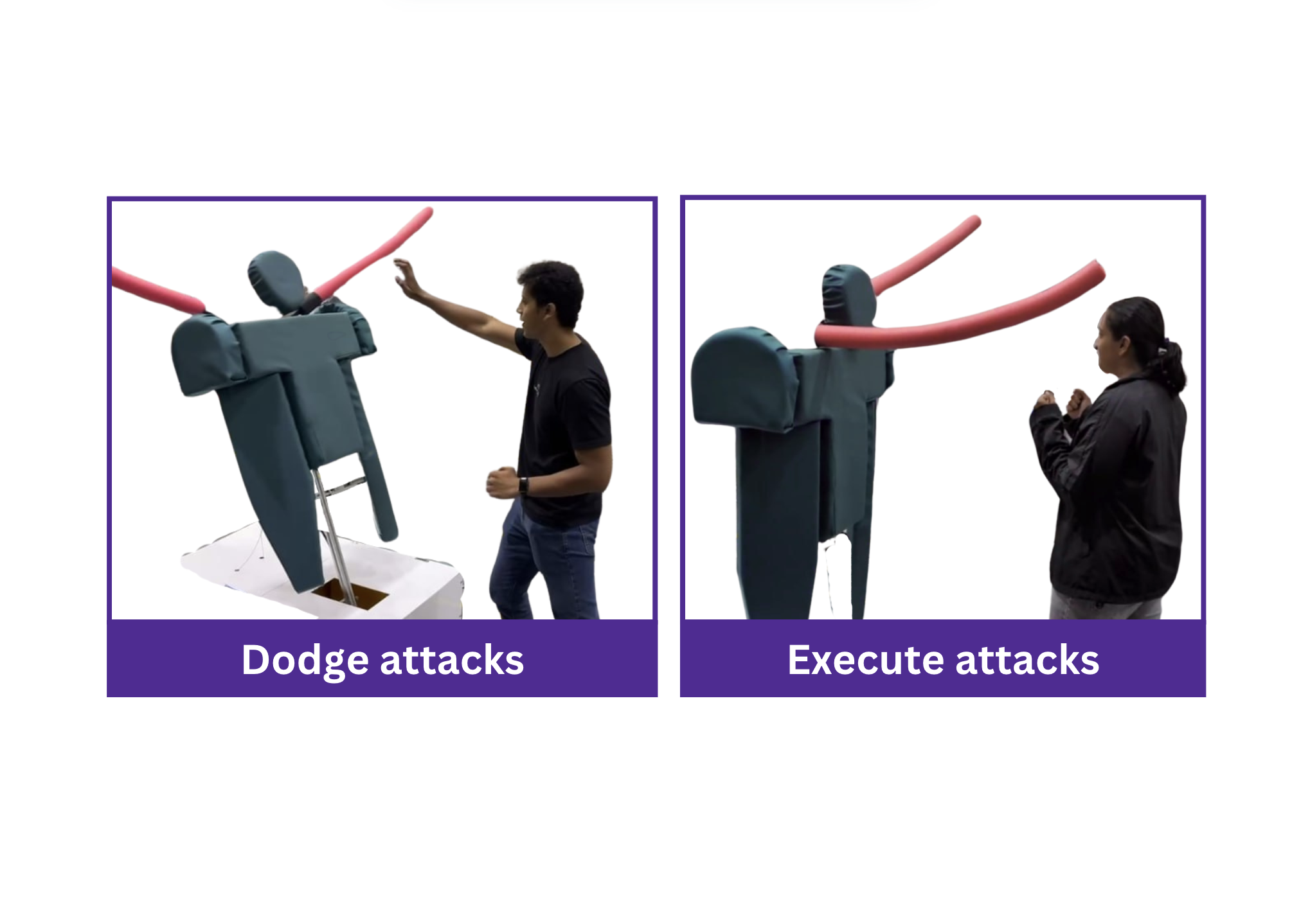
Upon first receiving the problem statement, the group outlined a few requirements on the behaviour and look of the manikin: being able to dodge incoming attacks and execute attacks, and keeping a humanoid appearance to best facilitate training. This led to the exploration of using different techniques such as silicon casting, upolstering, and foam sculpting.
Iteration
After creating the first set of drawings, a second round of ideation was held to give the industry partners a few more options when it came to the look of the manikin. Although a humanoid dummy (such as BOB) was chosen at first, there were sourcing issues for obtaining this model. As such, a deconstructed and modular version of the manikin was designed.
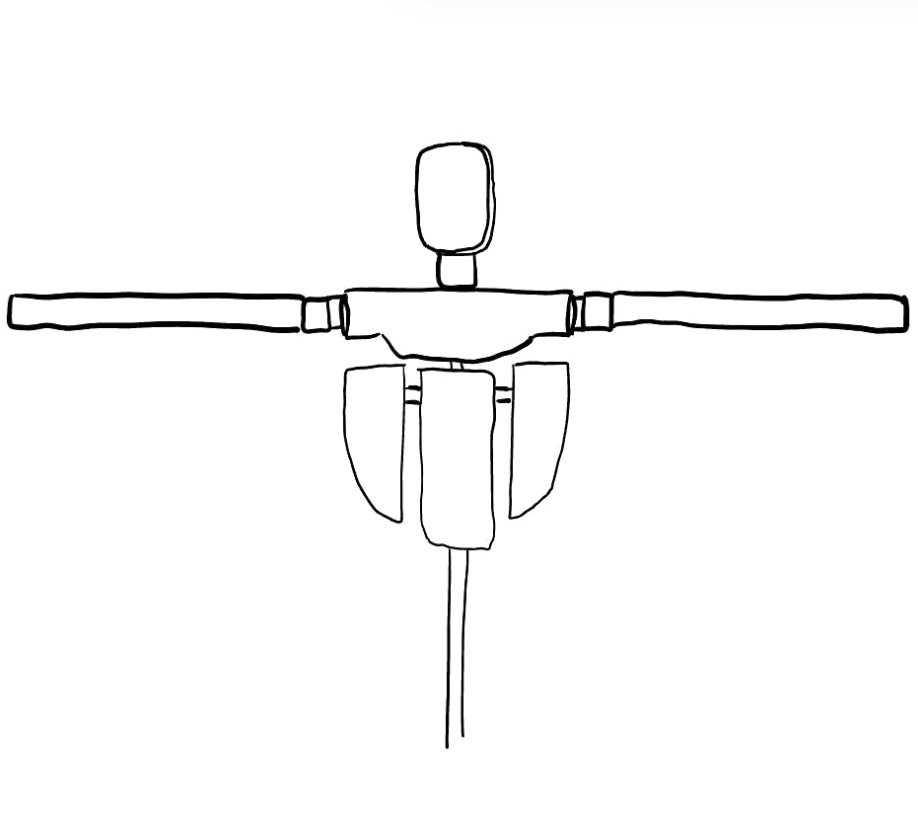
Action Drawings
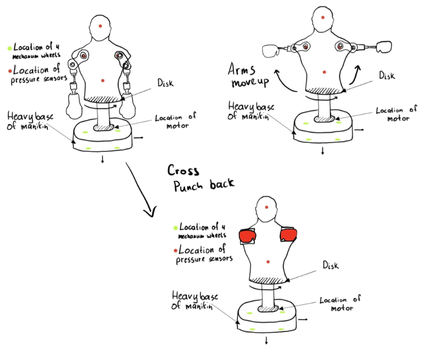
The next step in the prototyping process was designing the movement mechanics. A few different iterations of how the robot would attack and dodge can be seen on the left. These consist of fully moveable arms with boxing gloves attached to simulate a more aggressive assailant. However, after further discussion with are industry partner, there were some concerns on the safety of this design. These concerns were addressed during the CADing and material sourcing phase.

CAD
Before starting the assembly, a CAD was constructed to simulate how each component and joint would move, allowing for further finetuning and addressing any safety concerns through material testing. This also allowed a 360 view of the product before construction to minimise adjustments during assembly.

Exploration
After the initial CAD was completed, further exploration was conducted on different shapes and materials. In the selection process, we took into consideration the safety factor and failure potential of the mechanisms, as well as made sure both the team and industry partner were confident in the evidence-backed proposal.
Design Selection
Using the selection criteria from the exploration phase, we decided on this humanoid structure, that addressed our weight concerns by using pulleys and dual springs for the dodging mechanism. Further, we selected materials for the arms of the retaliation mechanism and the punch padding based on this criteria.

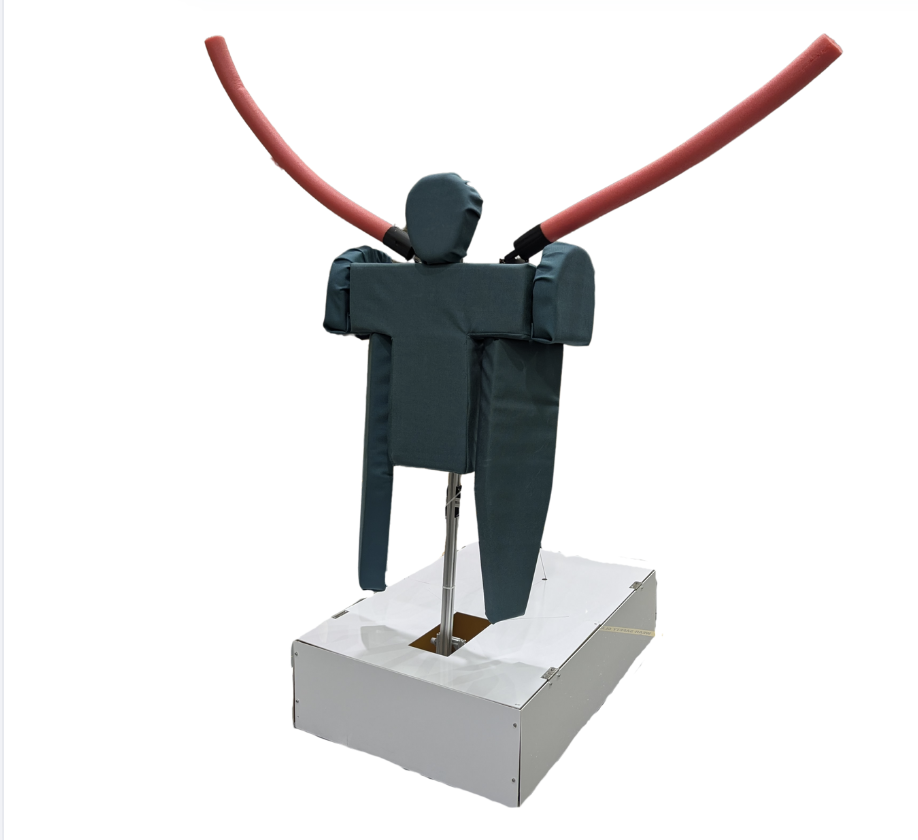
Final Product
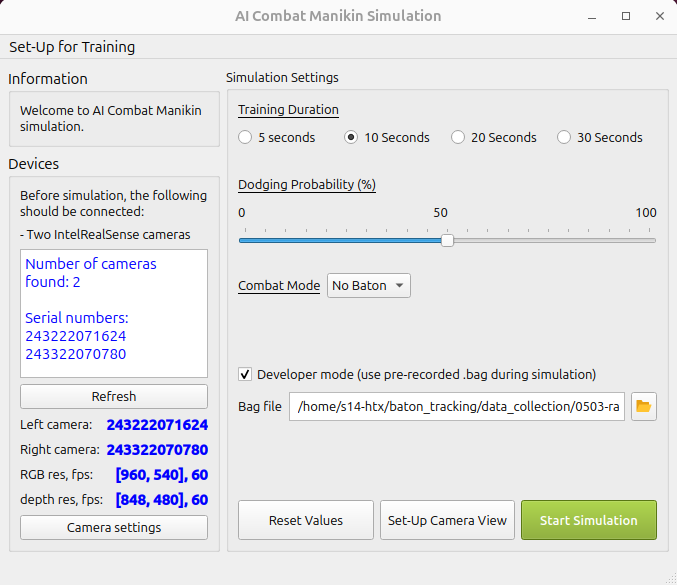
All the different components were built and integrated to create our final product. Further, some final customisation in the feel and durability of the robot were conducted in order to finetune the product for speed and reliability. Lastly, this product was integrated with our software architecture to produce a working model of our AI Combat Manikin.