


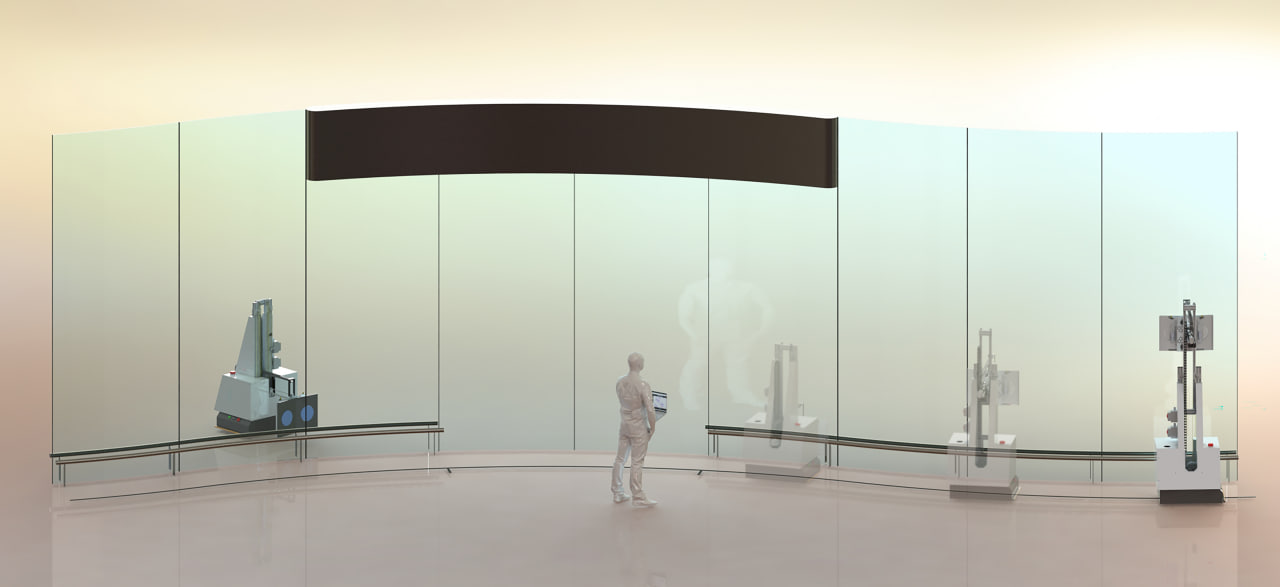
With a length of around 200m and a height of around 4m, the glass barriers in the arrival halls are the first things tourists and returning Singaporeans see when they enter Singapore. As such, these barriers’ cleanliness is a main priority, having cleaners clean them regularly. According to an airport cleaner we interviewed, these barriers are manually cleaned daily in the morning. Cleaning is done with a moist microfibre cloth and without ladders to reach higher heights. As CAG looks towards bringing automation into Changi Airport, one of the main areas it is exploring is the automation of cleaning, reducing the workload required to maintain the desired level of cleanliness.

“How might we design an efficient and portable robot for large-scale automated cleaning of glass panels of varying curvatures in the arrival halls at Changi Airport?”
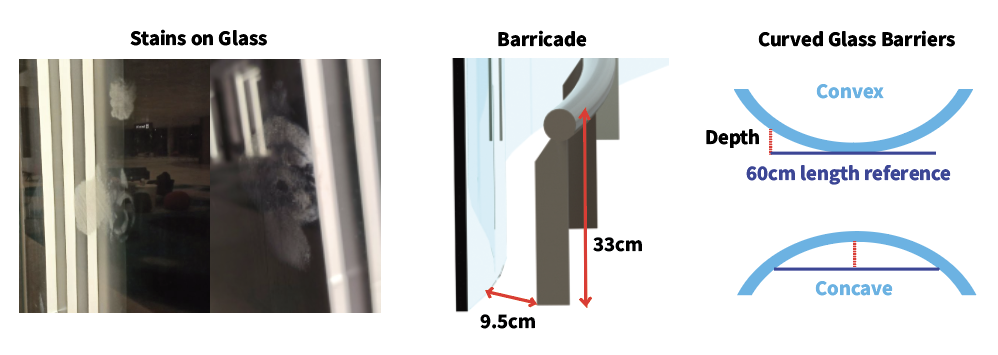
A site analysis was done at the Terminal 2 arrival hall, where three main challenges were identified for cleaning automation. Firstly, we noted that our robot must be able to reach 2m height as it is a human-reachable length and is more prone to stains such as lipstick marks and fingerprints. Secondly, there is a short metal barricade, which we will need to overcome to clean the lower edge of the glass barrier. Thirdly, we quantified the depth of the curve to have a maximum of 2cm depth using a 60cm length reference, which we have to account for in our robot’s end effector design.
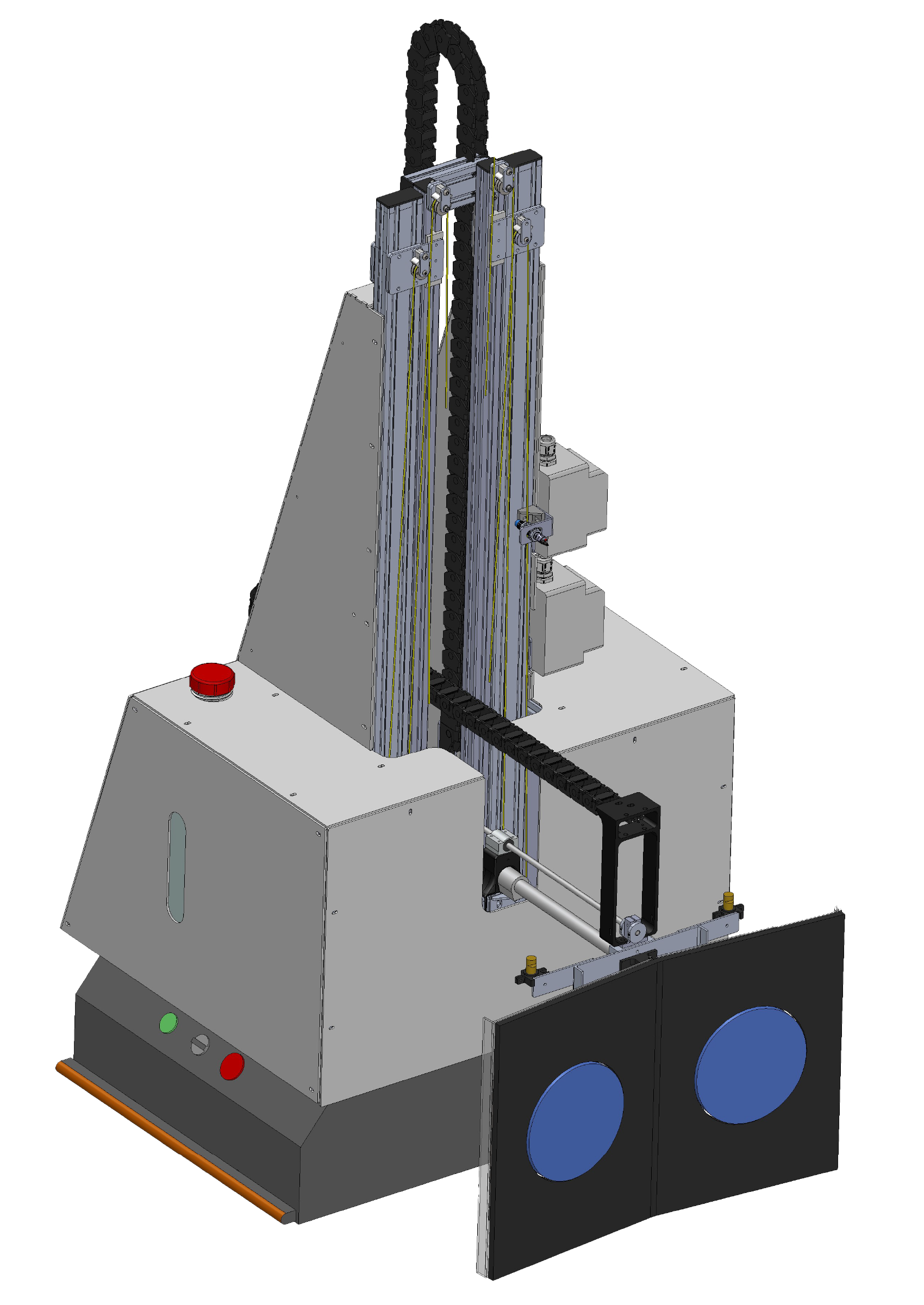
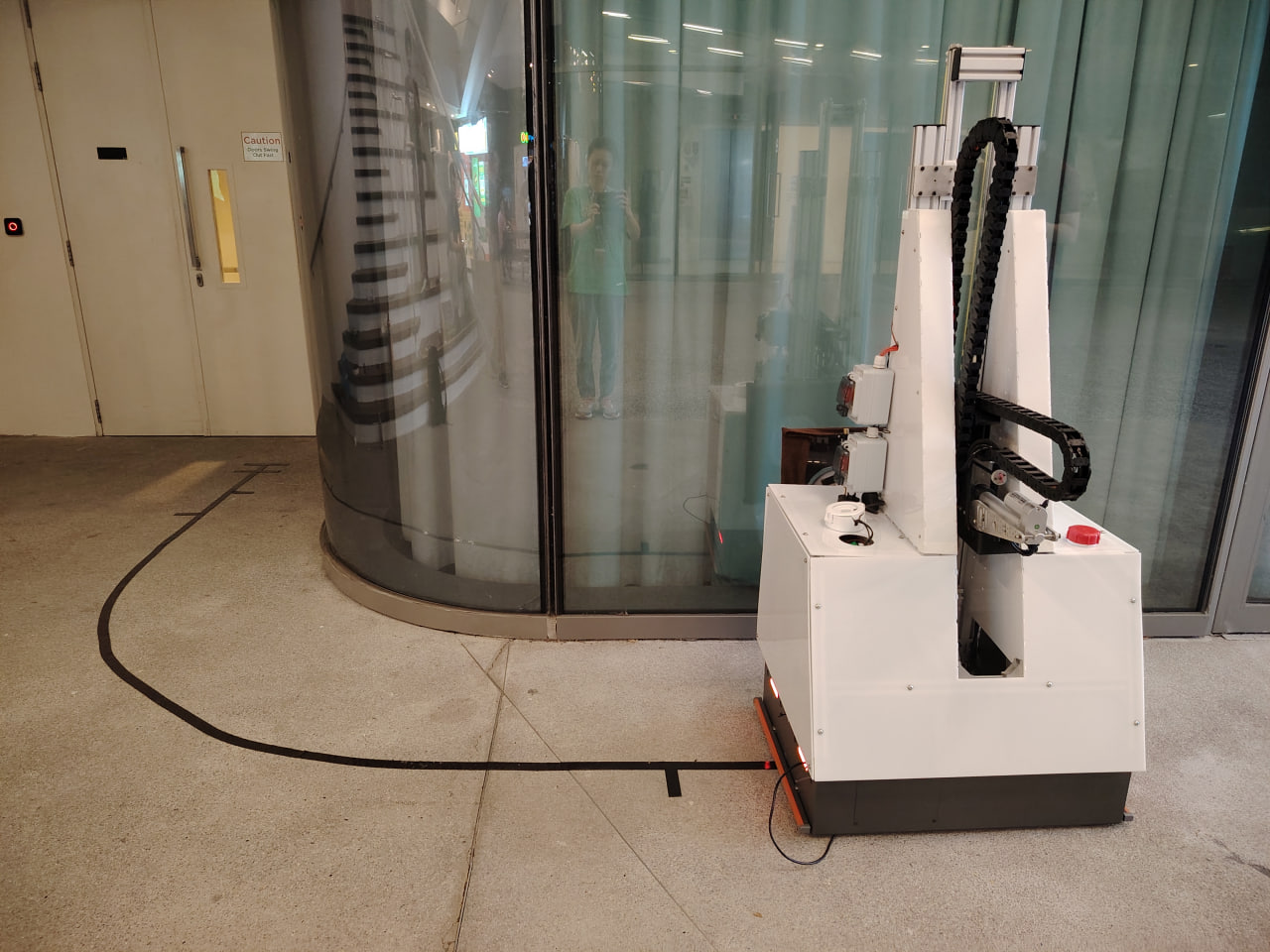
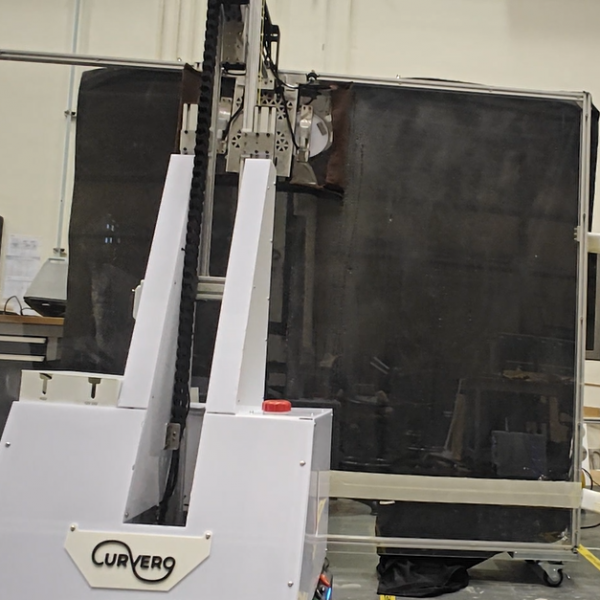
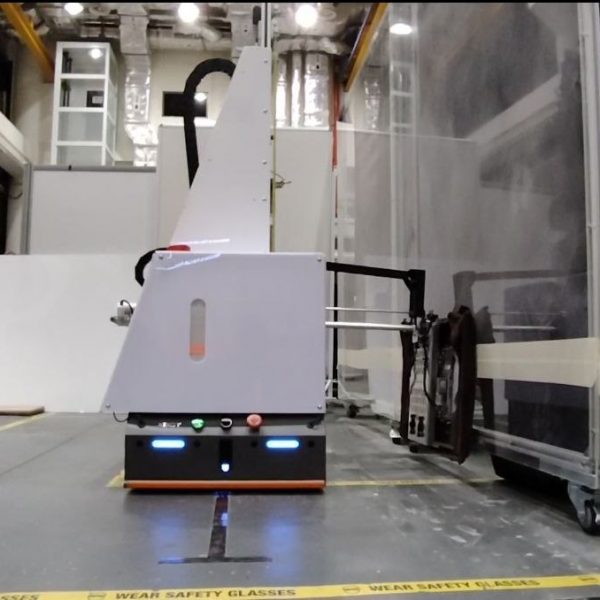
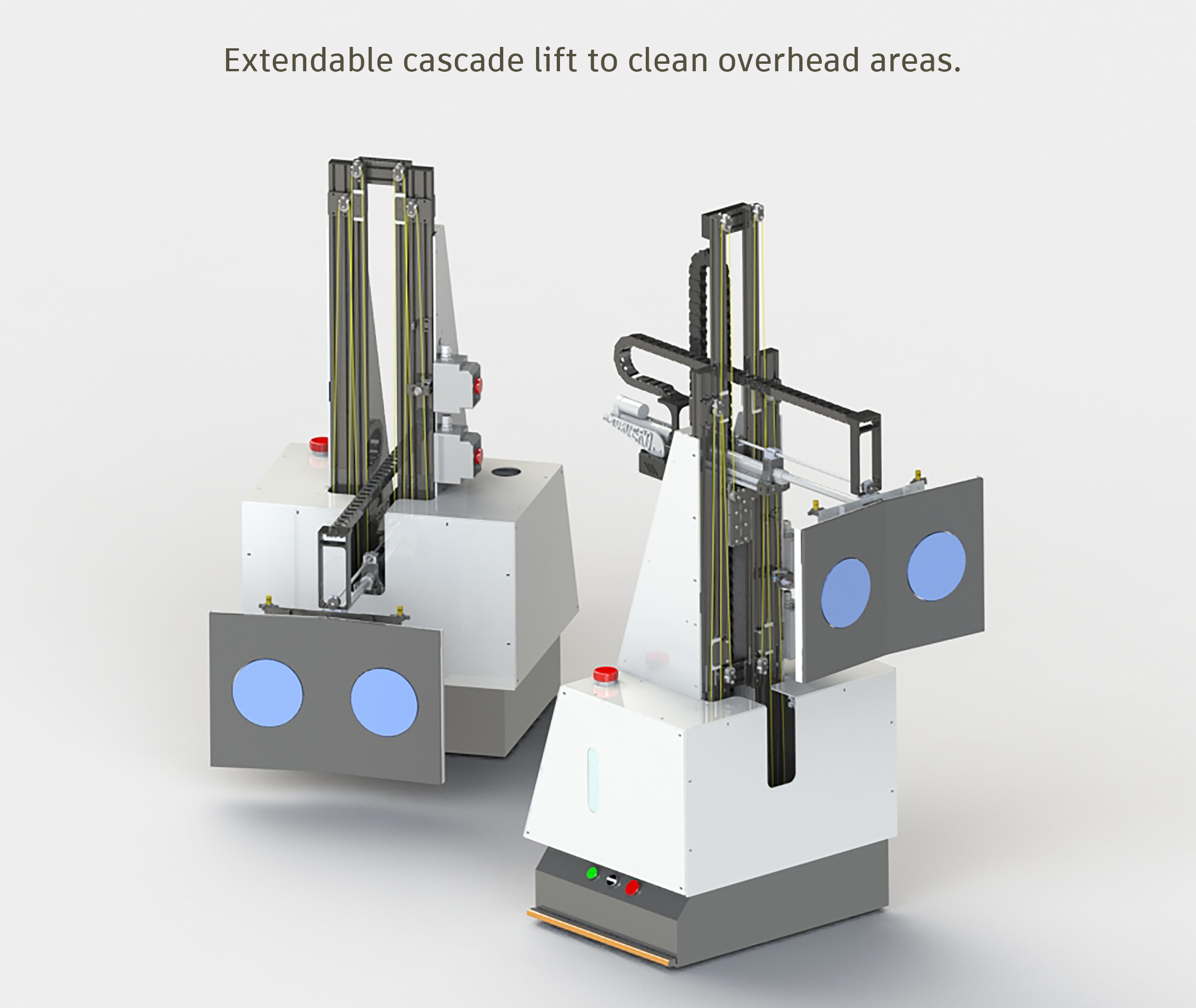
Curvero uses a commercial AGV (XBOT-100) as a base to move our lifting and cleaning mechanisms. The lifting mechanism consists of a cascade lift, when collapsed, stands at a height of 1.51m. It extends to allow the brush head to be positioned anywhere from the ground to a height of 2m. The cleaning mechanism consists of a linear actuator and brush head that provides sufficient force and area to clean the glass barriers. Furthermore the size of the brush head is constrained to the space between the metal barricades and glass barriers while still being able to conform to the curvature of the barriers.
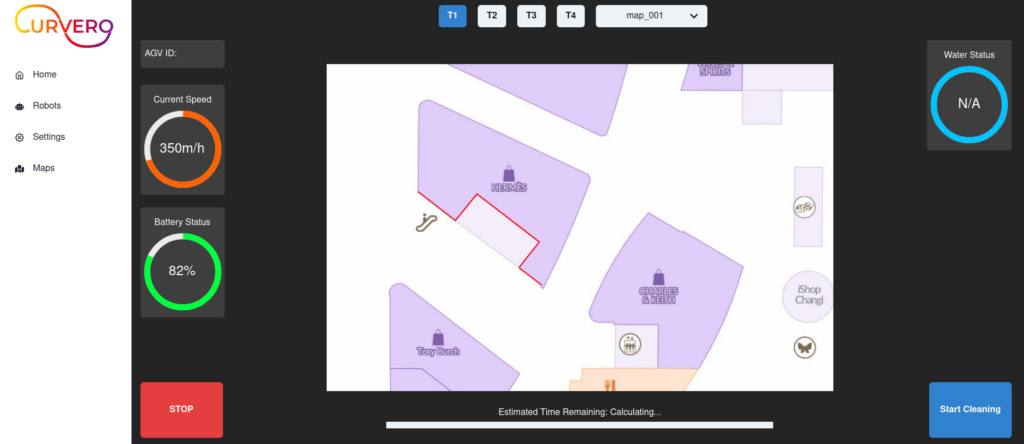
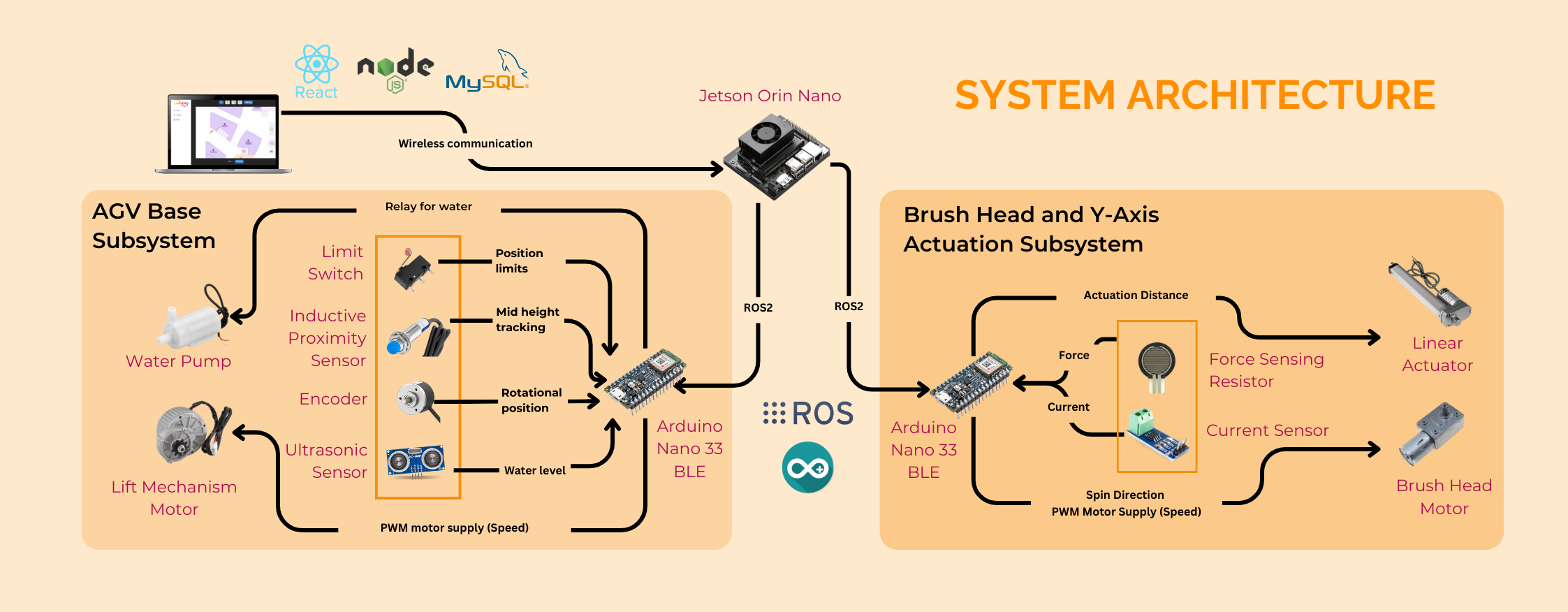
ROS2 is used to monitor the robot, allowing for ease of use and control as well as providing a layer of safety along with other features mentioned more in the later sections.
In this section, we will be going through each individual subsystem and the control system that is used to ensure effective and safe operation. Curvero was built with safety in mind as it is tasked to deal with a space that encounters high traffic flow.

Meet Curvero’s Lifting Mechanism—a high-speed, high-precision vertical actuator designed to elevate and position heavy components with power, control, and reliability.
a robust cascade lift system engineered to elevate a 15 kg payload (the weight of its own components, the Y-axis Actuation Mechanism and Brush Head) to a height of 2 meters in just 5 seconds.
Precision is built into every movement. Encoders, proximity sensors, and limit switches work in perfect sync to provide flawless height control. Real-time positional data feeds into a closed-loop feedback system, enabling smooth, repeatable lifting motions—while automated deceleration enabled by a proximity sensor eliminates abrupt stops, protecting the payload.
Power doesn’t have to be loud. Curvero’s cascade lift runs on a silent electric motor paired with POM (polyoxymethylene) sliders—eliminating the clatter and vibration commonly associated with traditional chain-driven lifts.
Safety is built in at every level. Curvero’s lift features a physical e-stop and a software-based e-stop accessible via the web app—so you’re always in control, even in unexpected situations.
Self-lubricating POM sliders and high-strength synthetic Dyneema strings replace traditional components like steel rollers and metal chains that require constant care. The result? A low-maintenance, worry-free system that keeps on performing.
Main Contributor:
Meet Curvero’s Y-axis Actuation— the system maintains consistent brush pressure towards the glass surface, compensating for the robot base movement errors (± 15 cm) during large-scale cleaning. Powered by real-time force feedback, current monitoring, and a smart control system.
PD controller adjusts linear actuator to apply steady force against the glass, using real-time FSR input.
Force Sensing Resistor (SEN-0047) detects glass contact pressure. Enhanced with a 3D-printed compliant force mechanism for better sensitivity and range.
ACS712 sensor monitors linear actuator current to detect brush contact and prevent overcurrent. This accelerates the approach phase, reducing delay in reaching the glass surface.
Connects Arduino Nano, sensors, motor drivers, and a fan for clean, reliable wiring and easy maintenance.
Features auto/manual modes, deep-cleaning motor control, force calibration, active cooling, and state machine logic—refined with Kalman filtering.
Main Contributor:
Meet Curvero’s Brush Head Mechanism — The Brush Head is designed to mechanically conform with glass barriers of various curvatures within the arrival halls. It is reliant on the Y-axis actuation system’s force control algorithm to allow for additional compliance with the glass.
In order to clean the area behind the metal barricade, the Brush Head adopts a flanged design to minimise material deflection without the need of using a thicker material. This allows the Brush Head to be compact.
The spring mechanisms allows for mechanical compliance for convex, concave and straight glass barriers of a maximum of 3cm depth (60cm length reference).
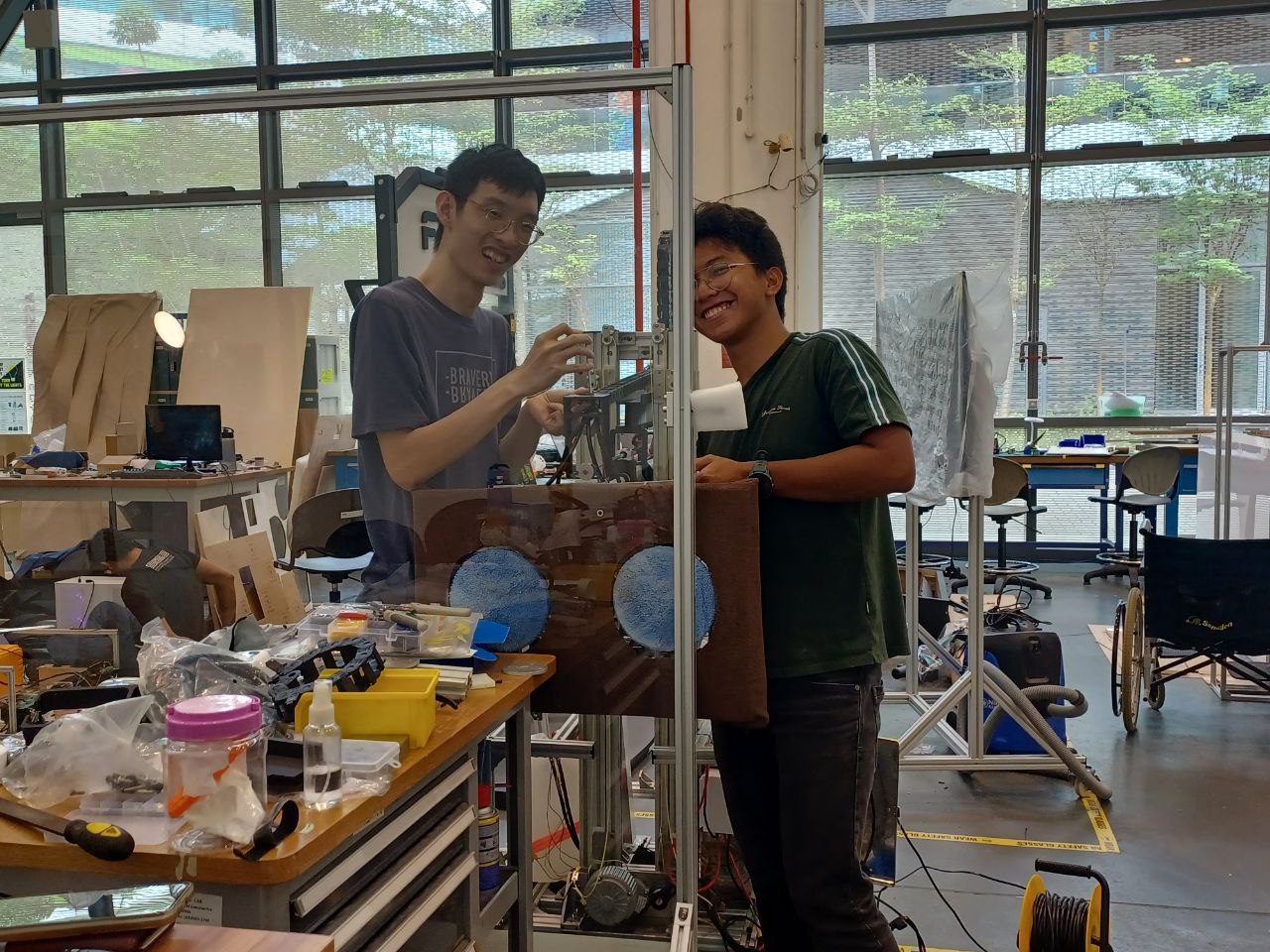
The brush head consists of of 2 high torque (Stall torque: 6.4kg.cm) 12V JGY-370 DC motors to overcome torsional friction to rotate microfibre brush pads to clean tougher stains of the glass. These motors are controlled by a motor driver board which allows for programmable speed and direction control. The brush head is tested to be able to remove cornstarch slurry.
In order to provide effective cleaning, the Brush Head comes with 2 nozzles attached to a water supply system. The nozzles allow for a flat and wide stream of water upon command to be sprayed on to the glass. This allows the Brush Head to be moist and for cleaning to be more effective.
Main Contributors:
![]()
![]()