To kickstart the project, our team first found out why this AUV is needed, and what problem it is meant to address.
PROJECT CONTEXT
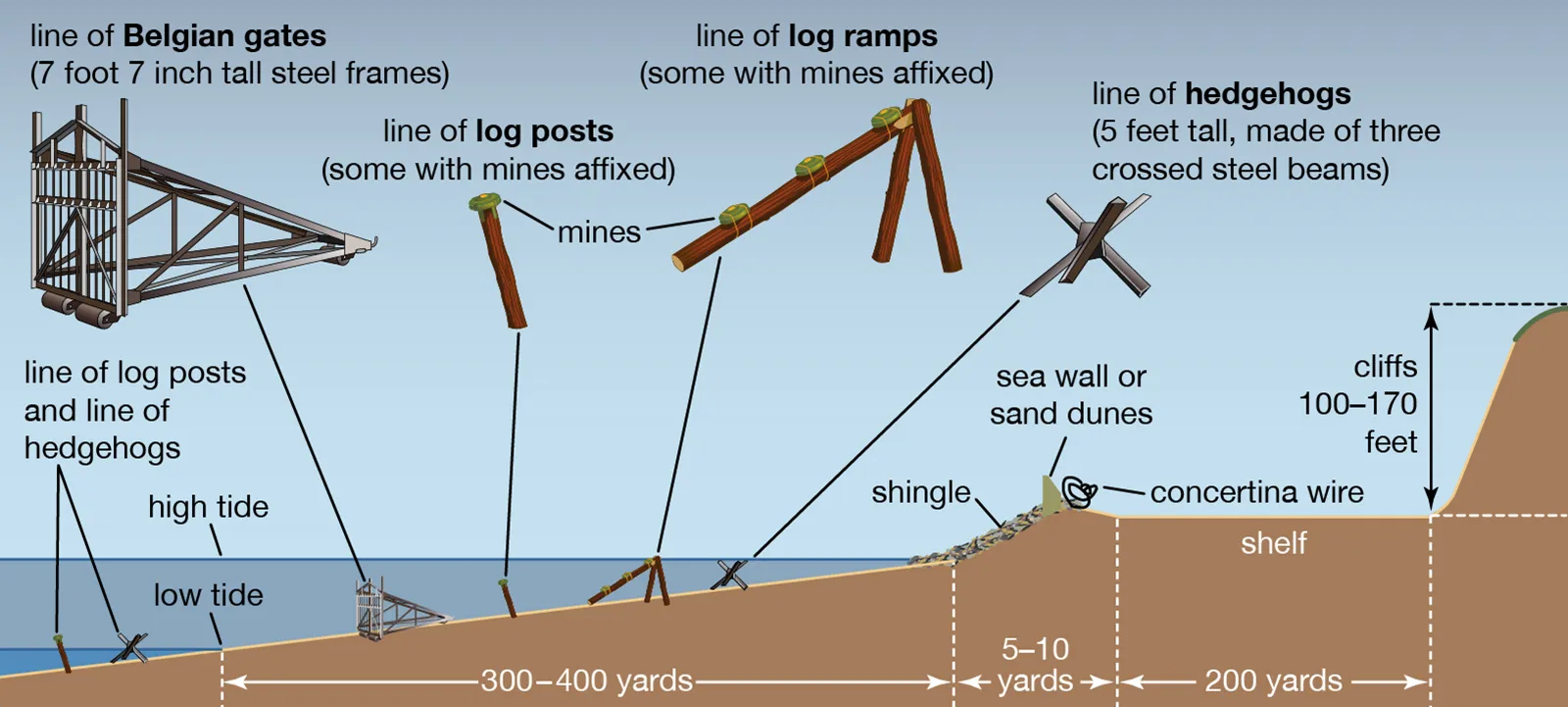
Some underwater operations like monitoring underwater infrastructure may be challenging and risky to be carried out manually especially in conditions where water is shallow and has blind zones that may obstruct or affect one’s vision for effective monitoring.
PURPOSE
To have an AUV that can inspect and survey the seabed for anomalies such as obstacles in depths between 0-10m, thereby reducing reliance on manpower and safeguarding personnel from performing dangerous tasks underwater.
Some examples of objects of interest given by our industry mentor are as shown in the image to the left. From this, our group came up with the following:
PROBLEM STATEMENT
How might we make underwater monitoring of the marine environment more affordable by developing a low-cost AUV that can operate at a depth of 10 metres for 30 minutes?
PROJECT REQUIREMENTS
MISSION REQUIREMENTS
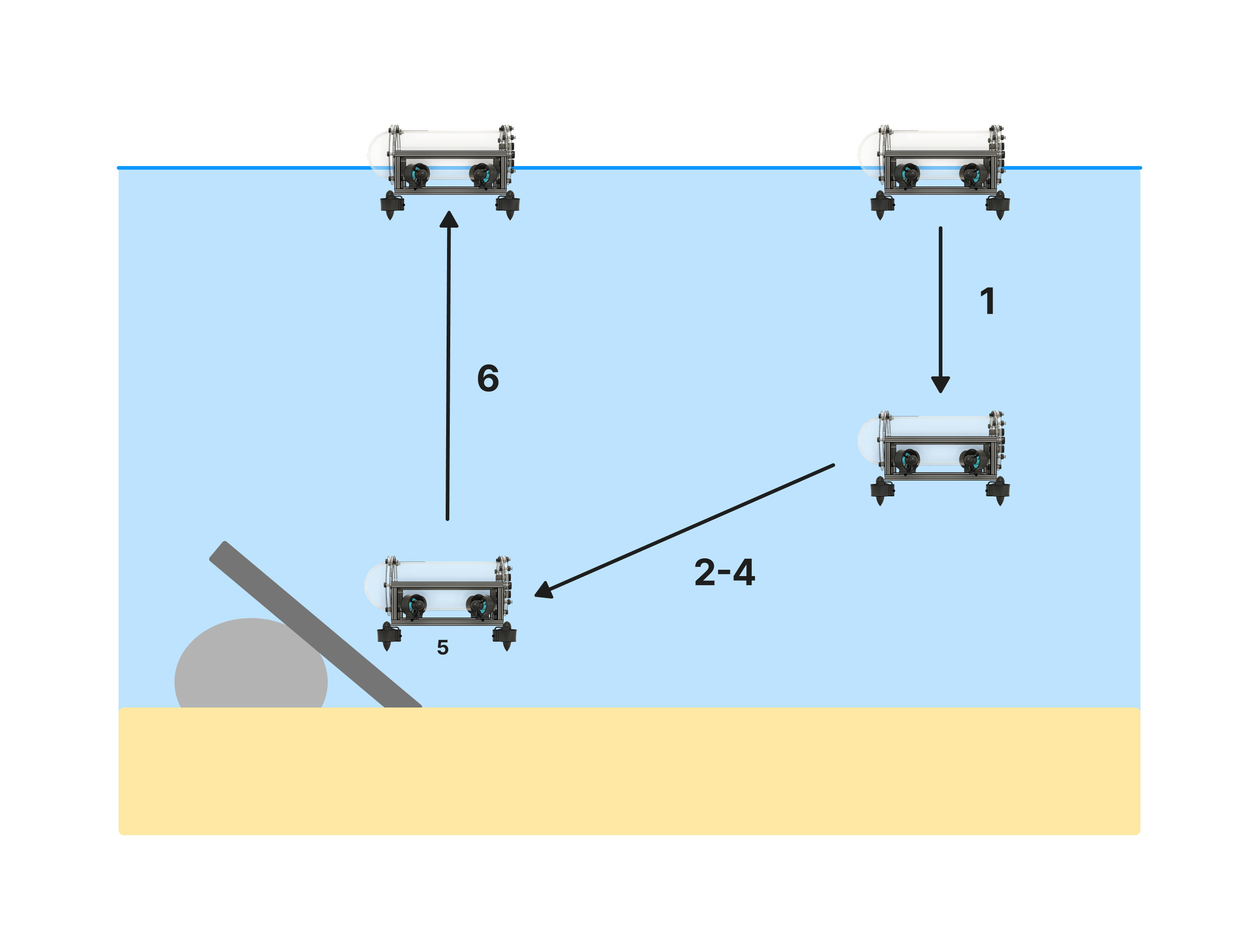
As seen in the image on the left, one mission cycle is defined as the following:
DESIGN PRINCIPLE
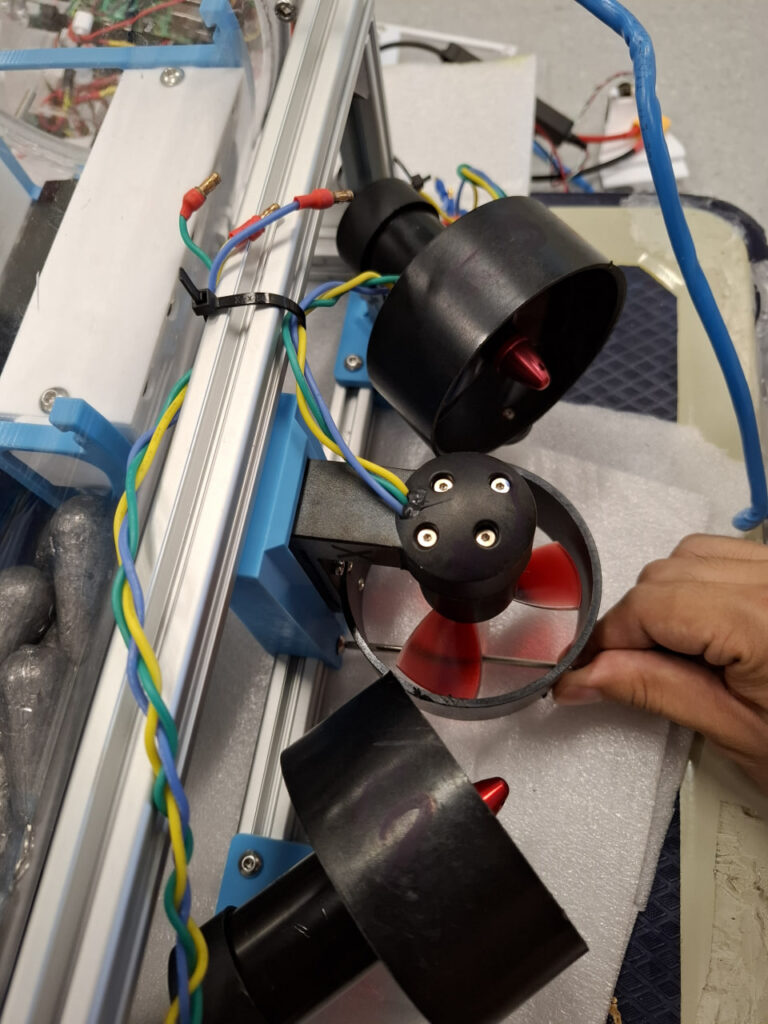
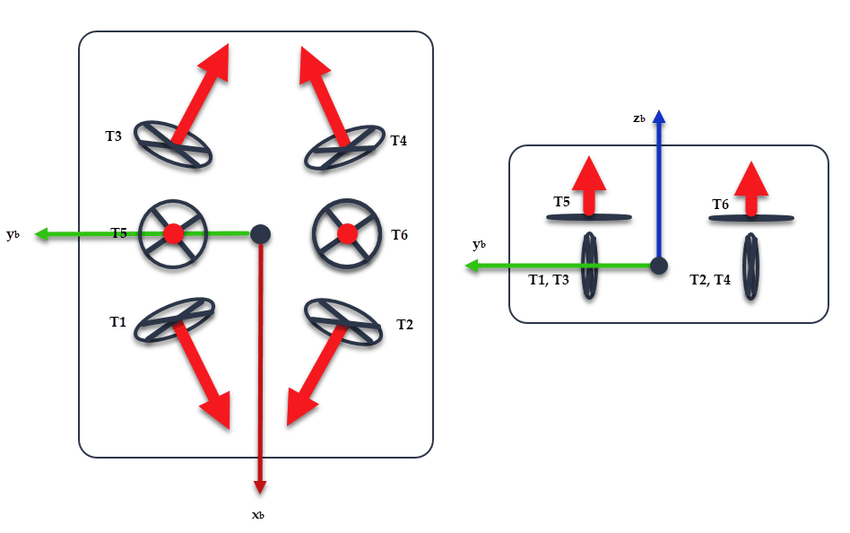
We are integrating a vectored thruster system into our autonomous underwater vehicle (AUV) to significantly enhance its maneuverability, stability, and precision in underwater operations. This approach aligns closely with the thruster configurations found in advanced remotely operated vehicles (ROVs), notably the BlueROV. The BlueROV’s proven design not only simplifies the physical integration of hardware components but also facilitates compatibility with existing open-source software frameworks, particularly ROS (Robot Operating System). Leveraging a similar thruster layout allows us to seamlessly integrate and adapt ROS scripts and control algorithms already validated by the BlueROV community, thereby accelerating our development and testing processes.
Additionally, cost management has been a crucial aspect of our design approach. While we initially had a budget allocation of SGD$4,000, we successfully developed a fully functional prototype at just SGD$2,924. This demonstrates our team’s effectiveness in optimizing resources and achieving a balance between affordability and performance, especially given the typically high costs associated with underwater robotics and sensor integration.
The image on the left illustrates the thruster configuration chosen for our AUV, inspired by the reliable, widely adopted BlueROV system.
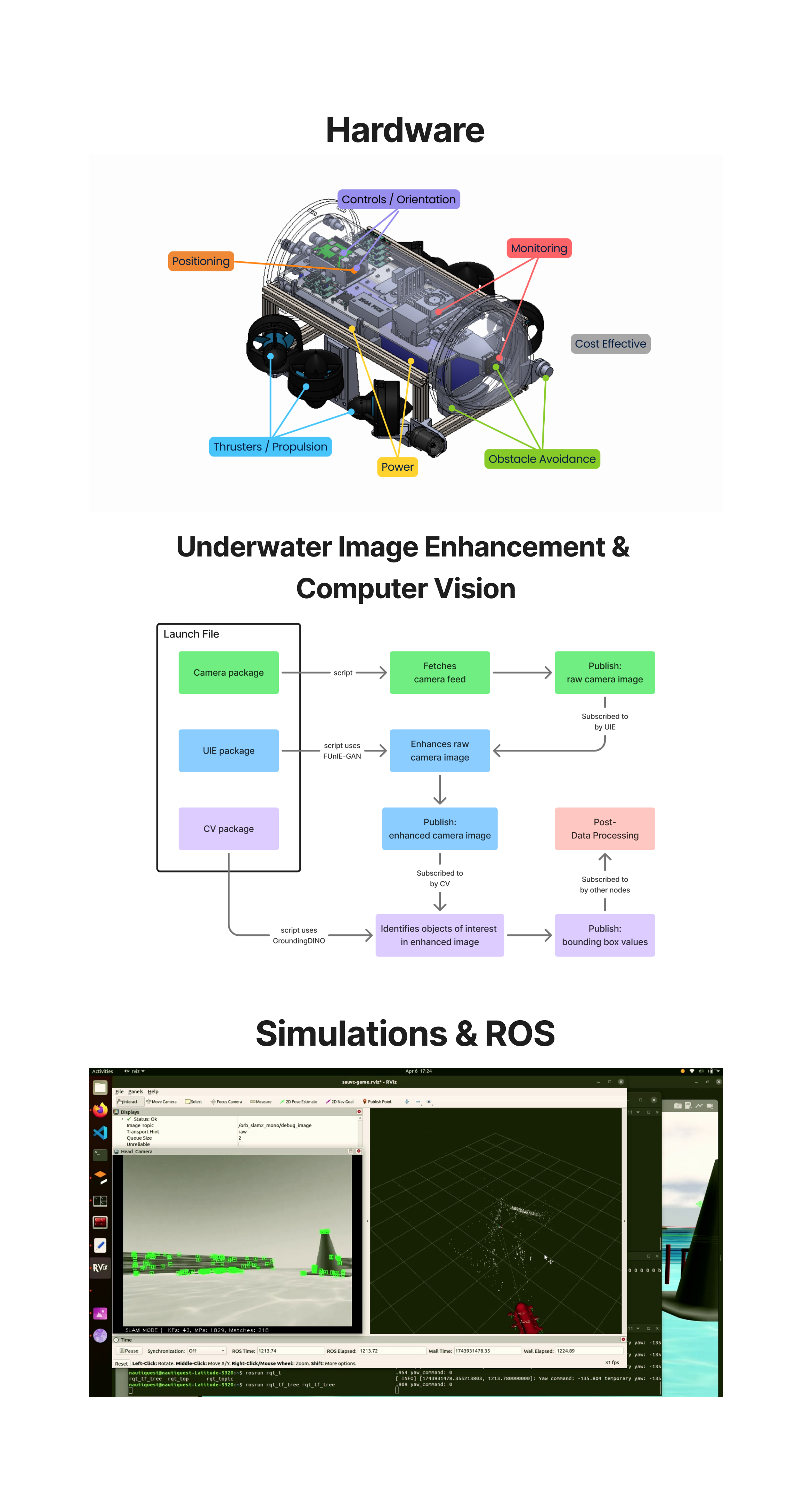
In this section, we will be covering three key areas: Hardware developments for our designed AUV, Computer Vision and Underwater Image Enhancement using machine learning models, and Simulations and ROS, focusing on realistic underwater environments for testing autonomous systems.

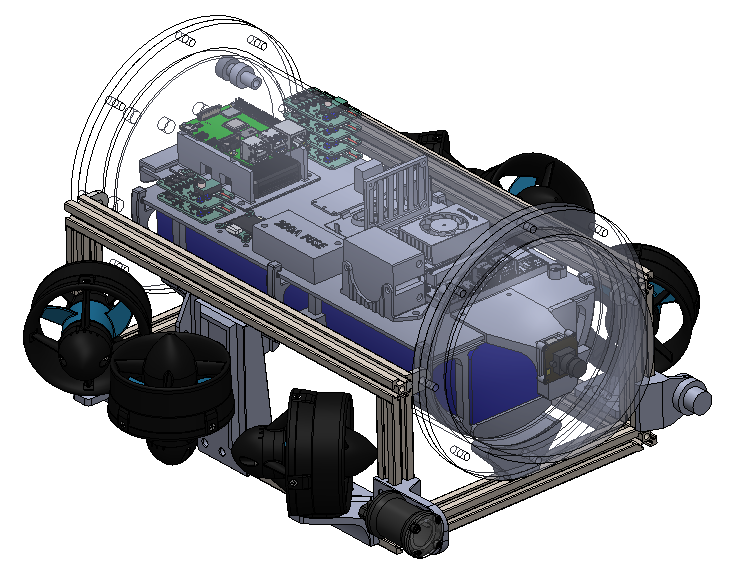
The NautiQuest AUV is a cost-effective, modular underwater drone developed for environmental monitoring and underwater inspection. It combines robust maneuverability, onboard intelligence, and sensor integration to deliver reliable performance at depths of up to 10 metres — making advanced underwater operations accessible at a fraction of the typical cost.
FEATURES
Our AUV utilises Fast underwater image enhancement (FUnIE) for Improved Visual Perception, an image enhancing algorithm, to improve the quality of the image captured by our AUV’s monocular camera. An enhanced image allows for computer vision model to better identify and classify detected objects.
UNDERWATER IMAGE ENHANCEMENT FEATURES
Our chosen computer vision model for visual-based guidance is GroundingDINO. GroundingDINO uses zero-shot object detection, allowing our AUV to identify any objects of interest captured by the camera underwater, feeding the data back to the ROS mainframe for decision making.
COMPUTER VISION FEATURES
The entire software stack is built using ROS Noetic. Additionally, a simulations platform is also created using Gazebo and ROS.
The ROS stack offers modularity and easy integration with hardware. It also provides access to a plethora of open-source libraries that can propel development.
SIMULATION FEATURES
This base platform allows spontaneous testing of software algorithms (navigation, perception, etc.) and reduces the deployment time.
Sensors used for AUVs can range from anywhere between S$3000-S$150,000. The platform helps with estimating the performance of different expensive sensors and compare them for custom missions.
The following software has also been tested on hardware –
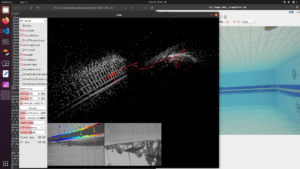
FMonocular SLAM based map creation
Simulations environment