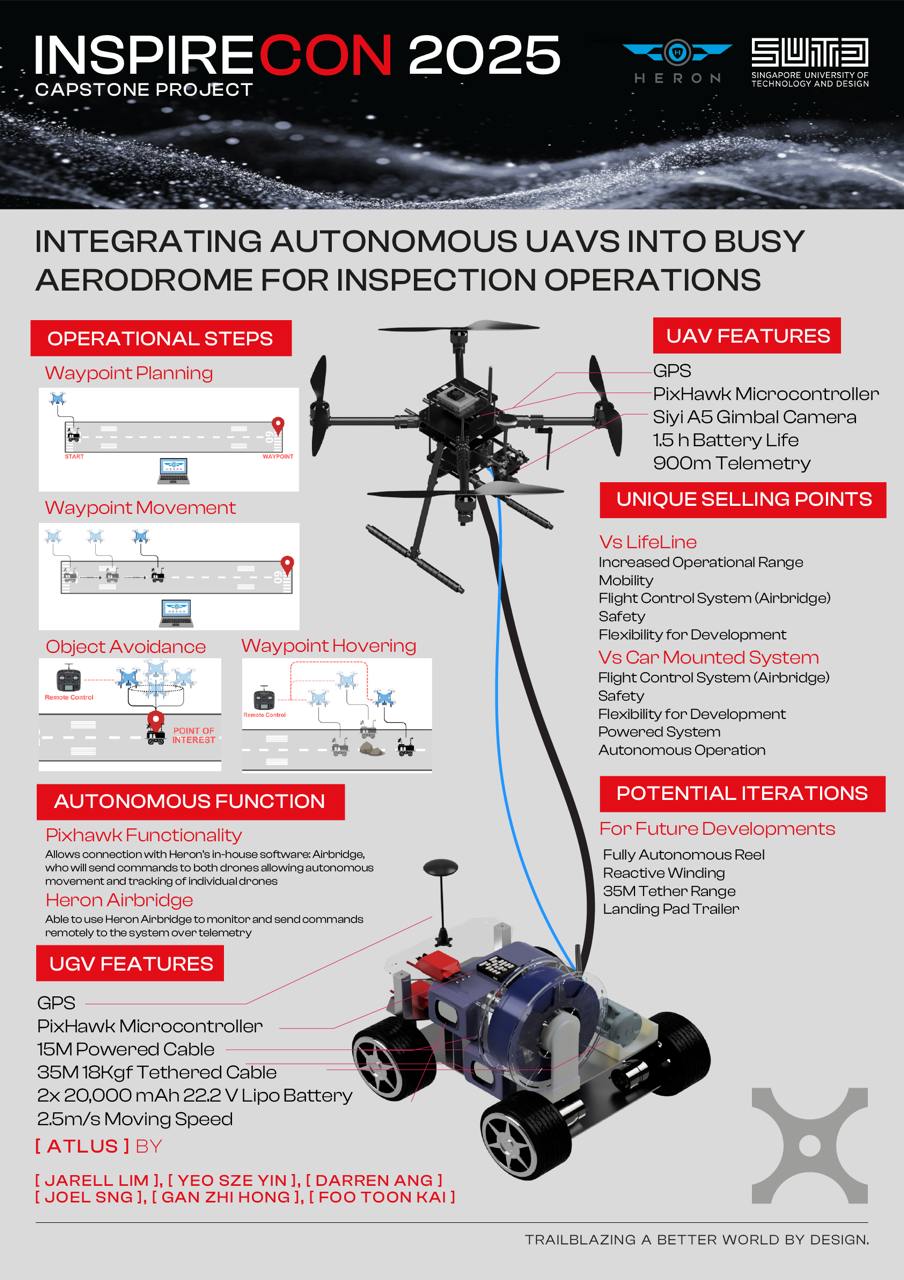
For our final iteration we have focused on three main aspects of the UAV design with a heavy emphasis on safety during drone operations

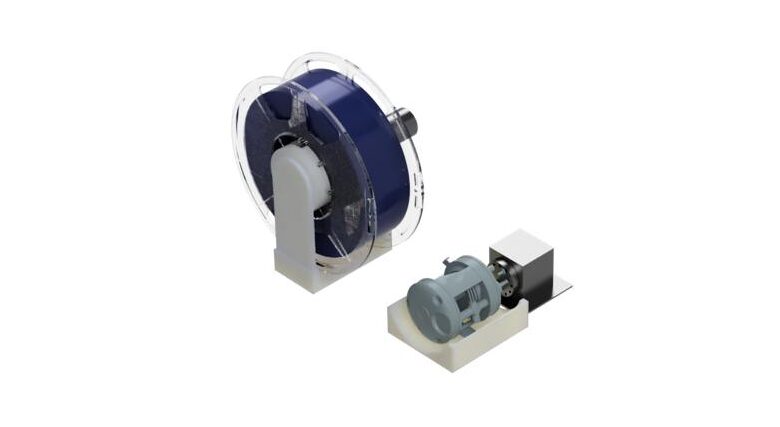
This is the reel which consist of a power tether and a fishing line reel retrofitted with a nylon line. The power tether provides the power to the UAV from the ground, increasing its operational time and provide as a safety tether for the UAV. The nylon line was used to further anchor the UAV to the UGV and provides additional security for the system.
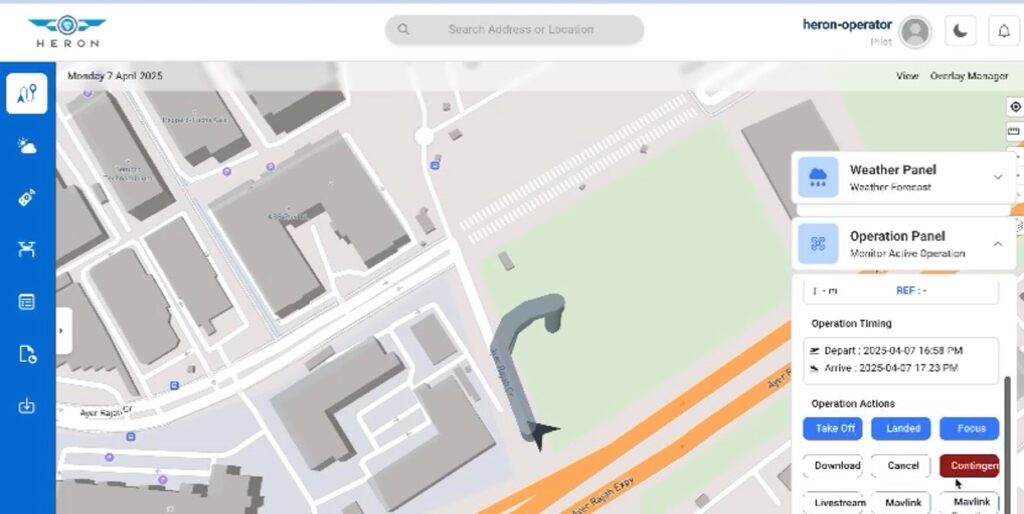
Waypoint planning
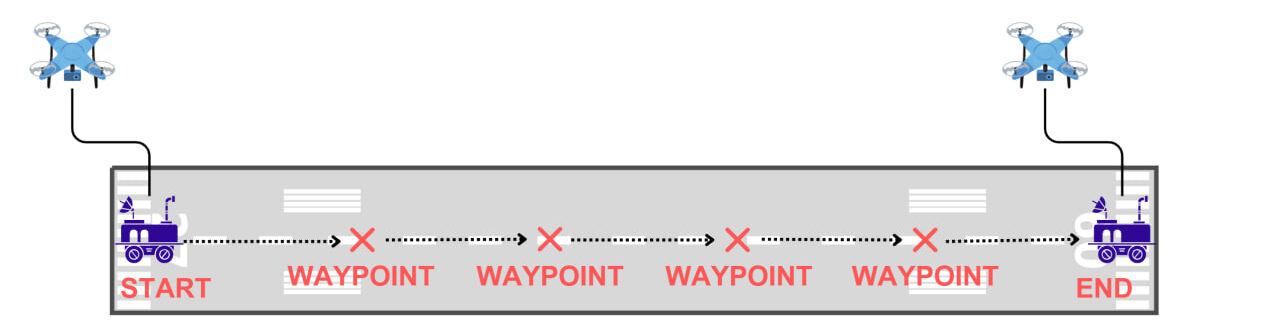
Waypoint Movement
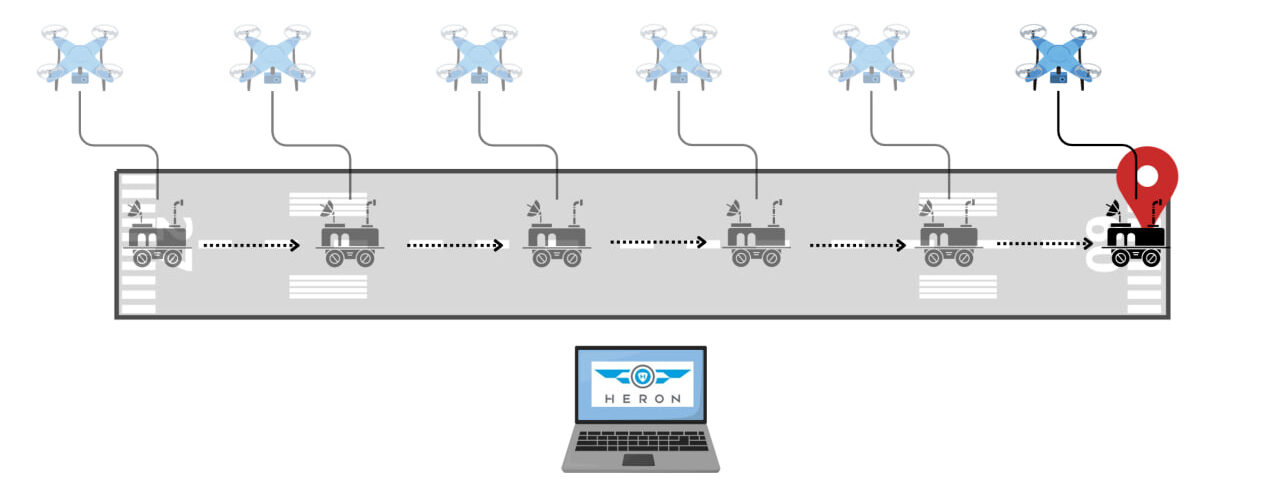
During operations, the operator is able to set and plan the required waypoint for the mission using Heron’s Airbridge and these waypoints will show up on the operators ground control unit. During the mission, operator is able to initiate “Start Mission” which will armed both the UGV and UAV and allow the UGV to move to the planned waypoint as per operations autonomously. UAV will enter “Follow” mode and will fly at 35m above the UGV and follow the UGV across the mission. Live feed will be send to the operators’ ground control unit and allow them to conduct inspections operations.


SIYI A8 Mini Gimbal camera is fitted onto the UAV to provide a clear 4k resolution live feed to the operators during the mission. The gimbal allows the camera to have a wide 360 degree view of the surrounding and to identify and potential hazards during the operations.